C51单片机控制步进电机详解
"C51单片机步进电机控制,清华大学课程资料,讲解了步进电机的控制原理和C51编程实现"
在C51单片机编程中,步进电机控制是一种常见且重要的应用,尤其在自动化设备、机器人和精密定位系统等领域。步进电机因其能够精确地转换脉冲信号为机械位移而被广泛使用。本资源主要涵盖了步进电机控制的几个关键方面:
1. 步进电动机控制原理:
- 步进电机通过接收脉冲信号来改变其位置,每个脉冲导致电机转过一个固定的步距角。电机的转速与输入脉冲频率成正比,这使得步进电机的运动控制具有很高的精度和稳定性。
- 反应式步进电动机是广泛应用的一类,根据相数不同(如三相、四相等),它们的步距角和复杂度有所差异。
2. 步进电动机的基本知识:
- 三相绕组的通电方式包括单三拍、双三拍和单双六拍。不同的通电方式会影响电机的旋转方向和步距角。
- 步距角θb可以通过公式(12-1)计算,其中Z表示转子齿数,N表示工作拍数。例如,对于三相电机,三拍方式的步距角为5°,六拍方式则减半为2.5°。
3. 步进电动机的转速控制:
- 转速n可以通过公式(12-2)得出,即n=NZ/60f,其中f表示脉冲频率。这意味着通过调整脉冲频率,可以方便地控制电机的转速。
4. 步进电动机的驱动方式:
- 单电压驱动是最简单的驱动方式,适用于小功率电机。它只有一个电源对电机绕组供电,但需注意限流电阻R1的选择,以保持合适的电流和功耗平衡。
在C51单片机上实现步进电机的控制,通常需要编写程序来生成脉冲序列,并通过脉冲分配单元将这些脉冲分配给电机的各个相绕组,以实现电机的旋转、速度和方向控制。同时,还需要考虑电机的加减速定位,以及适当的保护措施,如过流保护等。
掌握步进电机的C51单片机控制技术,不仅能提升硬件控制能力,也为开发涉及精确定位和运动控制的项目提供了坚实的基础。结合清华大学的课程资料,开发者可以深入理解步进电机的工作原理,并能够运用C51编程语言实现实际的控制系统。
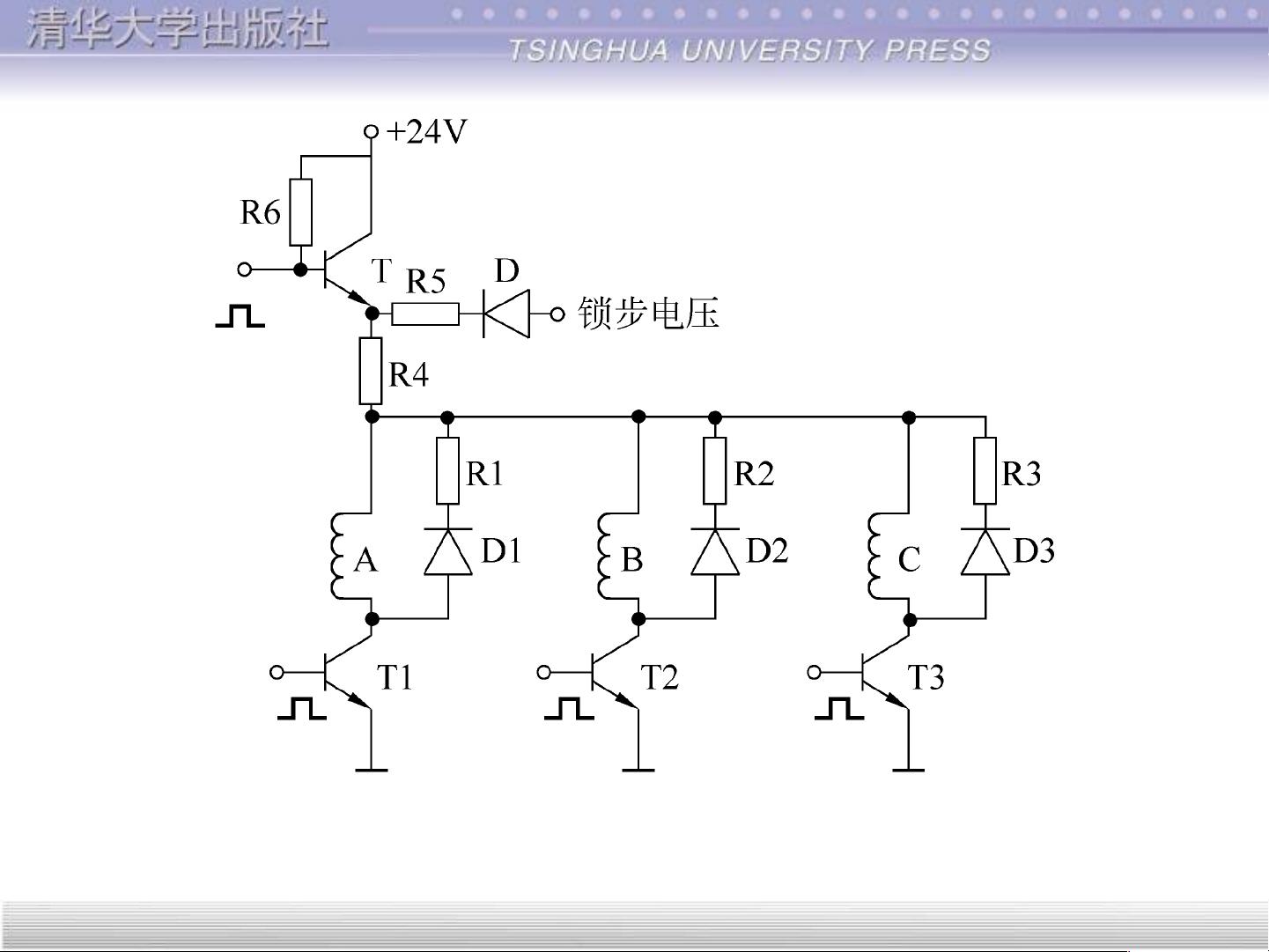
2. 高低电压驱动
在电动机开始移步时绕组加额定电压,使电机快速
移步,而在锁步时,加低于额定电压的锁步电压,
绕组只流过所需要的电流。这样既可减少电阻上的
功耗,又可以提高电动机的运行速度。如图 12-2
所示。
脉冲分配可以用脉冲分配器实现,但硬件电路实现
脉冲分配会使结构复杂,成本较高。如果用软件实
现脉冲分配,将简化电路,降低成本。
剩余54页未读,继续阅读
693 浏览量
点击了解资源详情
1692 浏览量
点击了解资源详情
177 浏览量
596 浏览量

my1108apple
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebDrive v16.00.4368: 简易易用的Windows风格FTP工具
- FirexKit:Python的FireX库组件
- Labview登录界面设计与主界面跳转实现指南
- ASP.NET JS引用管理器:解决重复问题
- HTML5 canvas绘图技术源代码下载
- 昆仑通态嵌入版ASD操舵仪软件应用解析
- JavaScript实现最小公倍数和最大公约数算法
- C++中实现XML操作类的方法与应用
- 设计编程工具集:材料重量快速计算指南
- Fancybox:Jquery图片轮播幻灯弹窗插件推荐
- Splunk Fitbit:全方位分析您的活动与睡眠数据
- Emoji表情编码资源及数据库查询实现
- JavaScript实现图片编辑:截取、旋转、缩放功能详解
- QNMS系统架构与应用实践
- 微软高薪面试题解析:通向世界500强的挑战
- 绿色全屏大气园林设计企业整站源码与多技术项目资源
