高级信号处理技术:雷达、声呐与医学图像解析
"高级信号处理技术在雷达、声呐和医学图像领域的应用"
在现代科技领域,高级信号处理技术是至关重要的一个部分,尤其在雷达、声呐和医学图像这三个领域中,它扮演着不可替代的角色。斯特吉奥普洛斯(Stergios Stergiopoulos)编辑的《高级信号处理手册》提供了深入的理论与实践知识,为相关领域的学习者和专业人士提供了宝贵的资料。
在雷达系统中,信号处理是确保目标检测、识别和跟踪的关键。它涉及到信号的发射、接收、滤波、增强以及目标特征提取等多个环节。例如,使用数字信号处理技术可以提高雷达的分辨率和抗干扰能力,通过匹配滤波等方法优化目标回波信号,从而实现更精确的目标定位和识别。此外,多普勒处理技术也是雷达系统中的重要一环,能够分析目标的速度和运动方向。
声呐系统则主要应用于水下探测,如海洋生物研究、潜艇定位和海底地形测绘等。在声呐中,信号处理技术用于改善信号质量,降低噪声影响,同时通过回声定位技术实现对水下物体的识别和距离测量。其中,脉冲压缩、波束形成和自适应滤波等技术是声呐信号处理的核心,它们能提高信号的信噪比,增强目标的探测能力。
医学图像领域同样离不开信号处理技术,尤其是在影像诊断中。例如,在CT、MRI或超声成像中,原始数据通常需要经过复杂的信号处理才能转化为可供医生分析的图像。图像增强技术可以改善图像质量,去除噪声,突出关键的病灶信息。此外,通过特征提取和模式识别技术,可以自动检测病变,辅助医生进行早期诊断。
斯特吉奥普洛斯的著作涵盖了这些领域的广泛内容,不仅包括基础理论,还涉及实际应用案例,旨在帮助读者理解并掌握高级信号处理技术。尽管书籍的部分内容涉及版权,但读者仍可以通过合法途径获取并学习,以提升在信号处理领域的专业素养。无论是雷达系统的优化,还是声呐系统的改进,或是医学图像分析的精准化,都离不开这些先进技术的支持。因此,《高级信号处理手册》对于从事相关工作或者对此感兴趣的人士来说,无疑是一本极具价值的参考书。
©2001 CRC Press LLC
processor
to provide mainstream signal processing for detection and initial parameter estimation; a
data
manager,
which supports the data and information processing functionality of the system; and a
display
sub-system
through which the system operator can interact with the data structures in the data manager
to make the most effective use of the resources at his command.
In this handbook, we will be limiting our attention to the
signal processor,
the
data manager
, and
display
sub-system
, which consist of the algorithms and the processing architectures required for their imple-
mentation.
Arrays of sources and sensors
include devices of varying degrees of complexity that illuminate
the medium of interest and sense the existence of signals of interest. These devices are arrays of transducers
having cylindrical, spherical, planar, or linear geometric configurations, depending on the application of
interest. Quantitative estimates of the various benefits that result from the deployment of arrays of
transducers are obtained by the
array gain
term, which will be discussed in Chapters 6, 10, and 11. Sensor
array design concepts, however, are beyond the scope of this handbook and readers interested in trans-
ducers can refer to other publications on the topic.
16–19
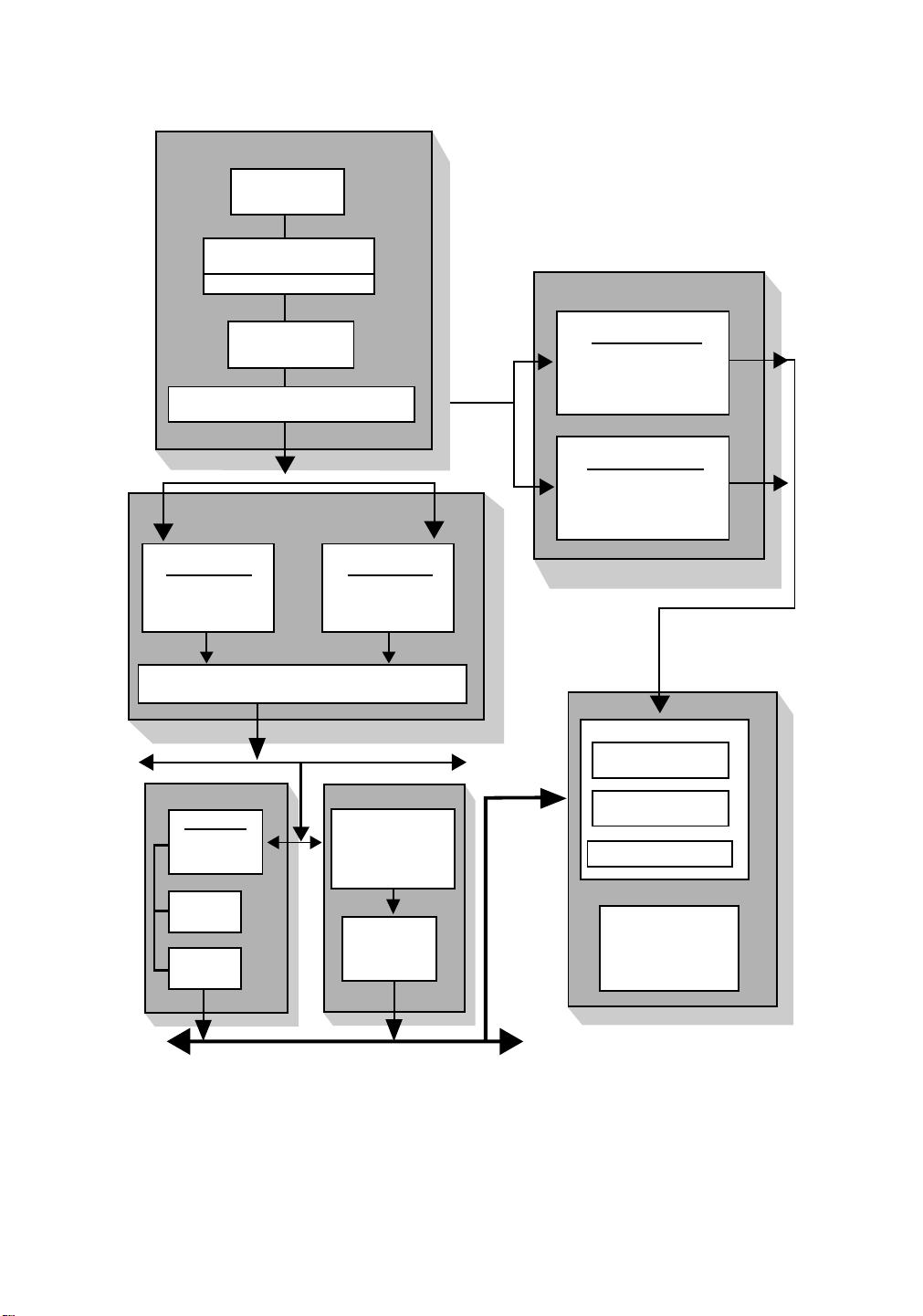
The
signal processor
is probably the single, most important component of a real-time system of interest
for this handbook. In order to satisfy the basic requirements, the processor normally incorporates the
following fundamental operations:
• Multi-dimensional beamforming
• Matched filtering
• Temporal and spatial spectral analysis
• Tomography image reconstruction processing
• Multi-dimensional image processing
The first three processes are used to improve both the signal-to-noise ratio (SNR) and parameter
estimation capability through spatial and the temporal processing techniques. The next two operations
are image reconstruction and processing schemes associated mainly with image processing applications.
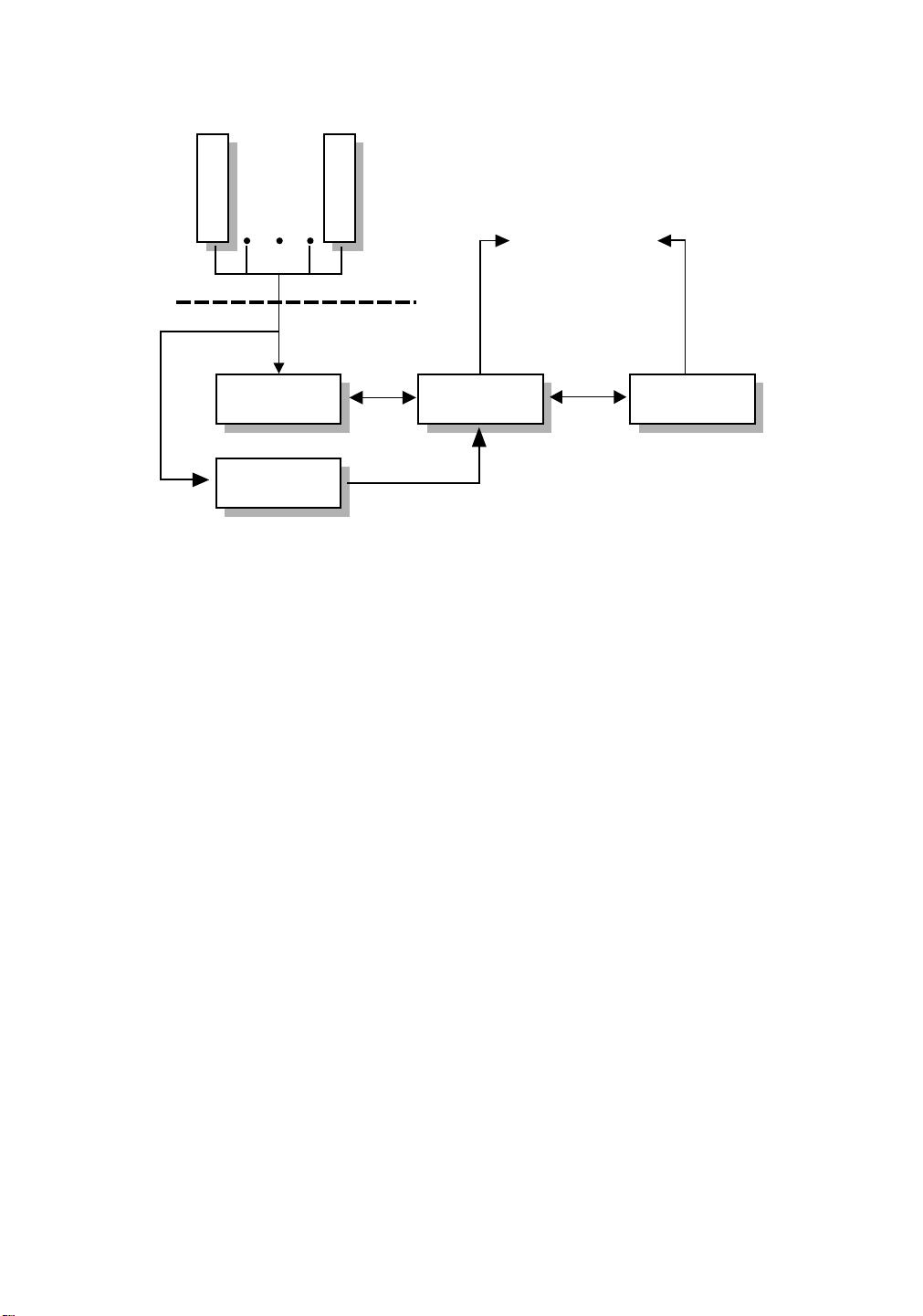
As indicated in Figure 1.1, the replacement of the
existing signal processor
with a
new signal processor,
which would include advanced processing schemes, could lead to improved performance functionality
FIGURE 1.1
Overview of a generic real-time system. It consists of an array of transducers, a
signal processor
to
provide mainstream signal processing for detection and initial parameter estimation; a
data manager
, which supports
the data, information processing functionality, and data fusion; and a
display sub-system
through which the system
operator can interact with the manager to make the most effective use of the information available at his command.
Existing SIGNAL
PROCESSOR
DATA
MANAGER
DISPLAY
SUB-SYSTEM
OPERATOR-MACHINE
INTERFACE
New SIGNAL
PROCESSOR
Transducer # 1
Transducer # n
MEDIUM


剩余710页未读,继续阅读
相关推荐







技术人生开心看世界
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 关于sql优化.doc
- 服装行业电子商务平台建设构想.pdf
- JAVA解惑之详细介绍
- sql server 2000
- Java项目开发常见问题分析
- accp5.0s2三层+OOP测试
- css常用参数说明文档
- Websphere Appliction Server Development Best Practices for Performance and Scalability.pdf
- 高质量C++编程指南.pdf
- FastReport_3.0_设计手册PDF
- The_C_Programming_Language_2nd_edition
- Test Automation Frame--主要框架的介绍.doc
- tuxedo编程速成
- JBossWeb用户手册
- PHP5与MySQL5 Web开发技术详解.pdf
- 很好的linux学习笔记
