C#上位机与西门子1200PLC定位控制:ModbusTCP实战
版权申诉
"该资源为一个关于C#工控上位机编程的实例教程,讲述了如何使用C#语言开发上位机,与西门子1200PLC进行ModbusTCP通信,实现对步进电机的定位控制。案例详细介绍了从硬件接线、PLC编程到上位机开发的全过程,涵盖了PLC控制、ModbusTCP通信协议以及C#开发上位机的优劣势。"
在本文中,作者首先引出话题,强调了文章的综合性和涉及的广泛知识领域,包括PLC的输入输出、步进电机控制、运动控制程序编写以及上位机与PLC的通信。项目开发平台选择了西门子的TIAPortal V15软件来编写PLC程序,配合S7-1214CDC/DC/DC型号的PLC控制步进电机,同时利用VS2019进行上位机的C#开发。
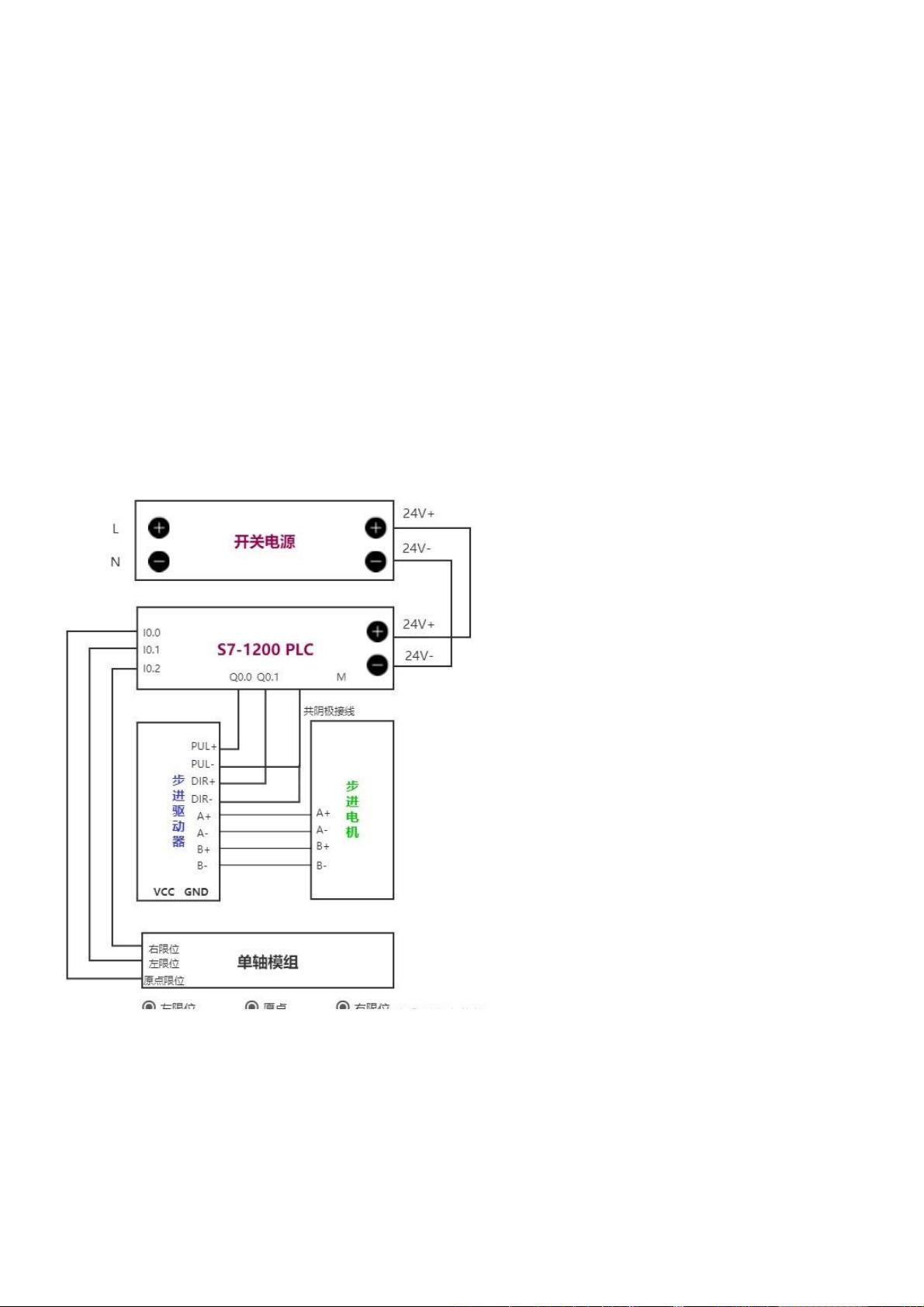
硬件接线部分,作者可能详细描述了PLC、步进驱动器、步进电机、单轴模组和限位开关的连接方式,确保信号的正确传输和电机的精准定位。
PLC编程阶段,作者使用了西门子的编程软件编写控制程序,以实现对步进电机的运动方向、速度和距离的精确控制。这可能涉及到定时器、计数器和运动指令的应用。
上位机开发思路部分,文章对比了组态软件和C#开发上位机的优缺点。组态软件虽然方便,但功能受限且成本较高,而C#开发则具有更大的灵活性和可扩展性,但对开发者的技术要求更高。为了实现与PLC的通信,作者选择了ModbusTCP协议,因为它公开、免费且易于开发通信库。
在通信协议的选择上,S7协议是西门子专有的,可能需要额外的通信库支持,而ModbusTCP则更为开放。作者可能详细讨论了两种协议的适用场景和实现细节,包括如何在PLC端设置允许ModbusTCP通信。
整个案例提供了从理论到实践的全面指导,对于学习C#工控上位机编程以及西门子PLC的用户来说,是一个非常有价值的参考资料。通过这个实例,读者不仅可以了解如何设计和实现一个定位控制系统,还能深入理解C#与PLC之间通过ModbusTCP协议进行通信的过程。
C#⼯控上位机实例_「C#上位机」西门⼦1200PLC实⽤定位
控制程序案例
1. 引⾔引⾔
本⽂是⼀篇综合性⾮常强的⽂章,从PLC输⼊输出及步进电机接线开始,到PLC运动控制程序编写,再到后续的ModbusTCP通信协议及上
位机编程实现最终控制,涉及知识⾯⽐较⼴,能够让我们很好地将所学知识结合起来。
2. 项⽬开发平台项⽬开发平台
采⽤西门⼦TIA Portal V15编程软件编写运动控制程序,实现PLC(S7-1200系列:CPU1214C DC/DC/DC )对步进电机的控制,再通
过编写ModbusTCP程序,将控制地址进⾏映射,从⽽⽅便上位机(VS 2019开发)与PLC进⾏通信,最终实现步进电机的运动⽅向、速度
及距离的灵活控制。
涉及硬件:开关电源、S7-1200PLC、步进驱动器、步进电机、单轴模组、限位开关
涉及软件:TIA Portal V15、VS2019、ModbusPoll(⽤于测试通信)
3. 硬件接线硬件接线
4. PLC编程
下载后可阅读完整内容,剩余5页未读,立即下载
131 浏览量
1169 浏览量
110 浏览量
2356 浏览量
3531 浏览量
3998 浏览量
424 浏览量
131 浏览量
1044 浏览量

_webkit
- 粉丝: 31
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- AvQL:数据库独立查询语言框架
- KSL Cars Plus-crx插件
- 似qq界面的可拖动窗口
- 10个数据结构课程设计实例二叉树建立遍历冒泡排序快速排序等.zip
- VSS-Joystick:带有USB蓝牙操纵杆的VSS-Simulator中的机器人控制项目
- Json
- jdk1.8 64位.zip
- SaliencyMapInPython
- 竖曲线标高计算(Excel模板)
- LibtorchDemo:试用PyTorch的C ++前端
- typeAngularAMD:angularJs + requireJs +类型脚本
- level5-01-threads-jjpokey:GitHub Classroom创建的level5-01-threads-jjpokey
- 零售连锁店经营管理之研究——以小北五金百货为例
- chromedriver_win32.zip
- Gatry Night Mode-crx插件
- click_fit:您现在可以使用鼠标选择一些任意点,并在您的顶部拟合一条曲线...-matlab开发
