机器人学导论第三版课后习题解密
"机器人学导论第三版课后习题答案"
这篇资源是关于《机器人学导论》第三版的课后习题解答,对于学习机器人学的学生来说是一份非常有价值的参考资料。这本书全面覆盖了机器人学的基础理论和实践应用,包括但不限于以下几个关键知识点:
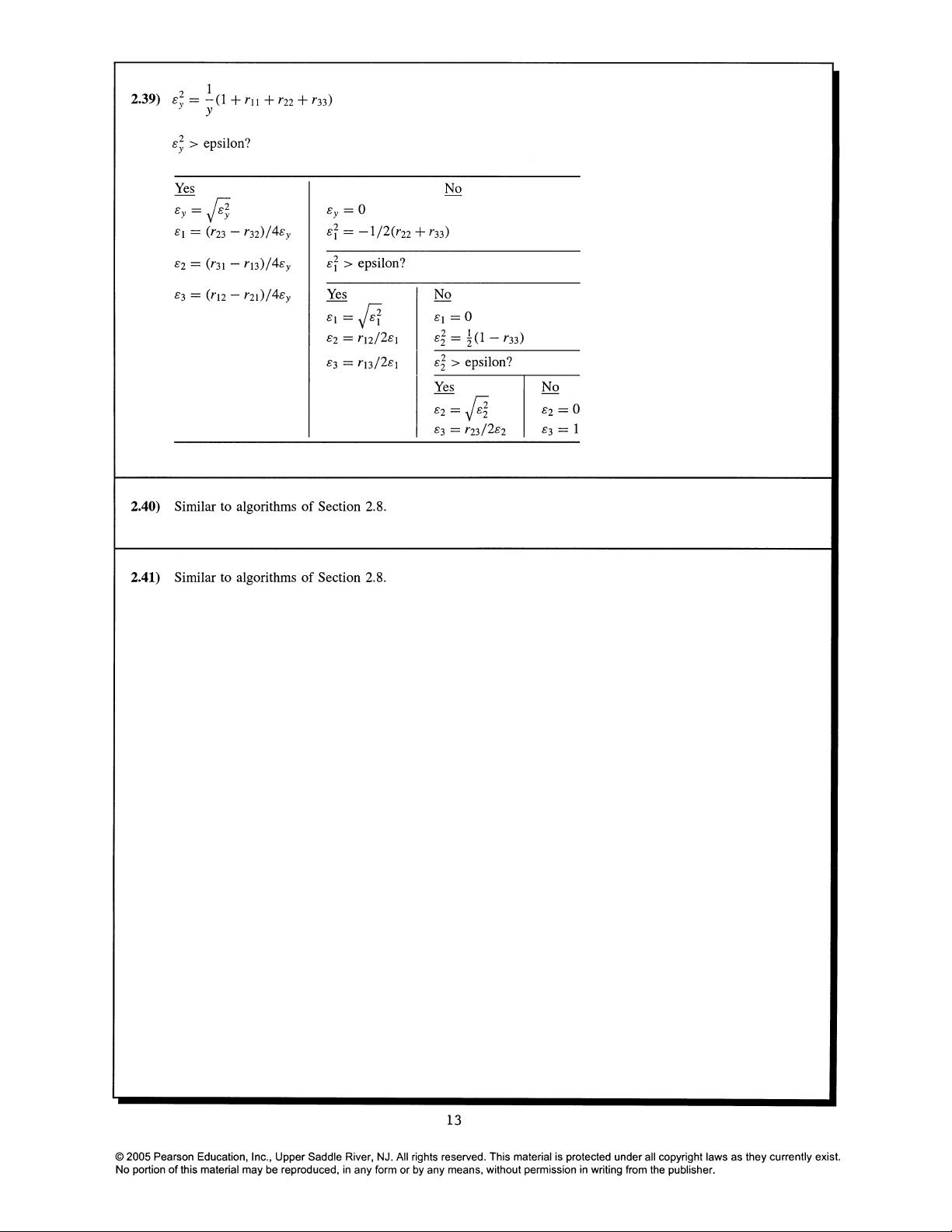
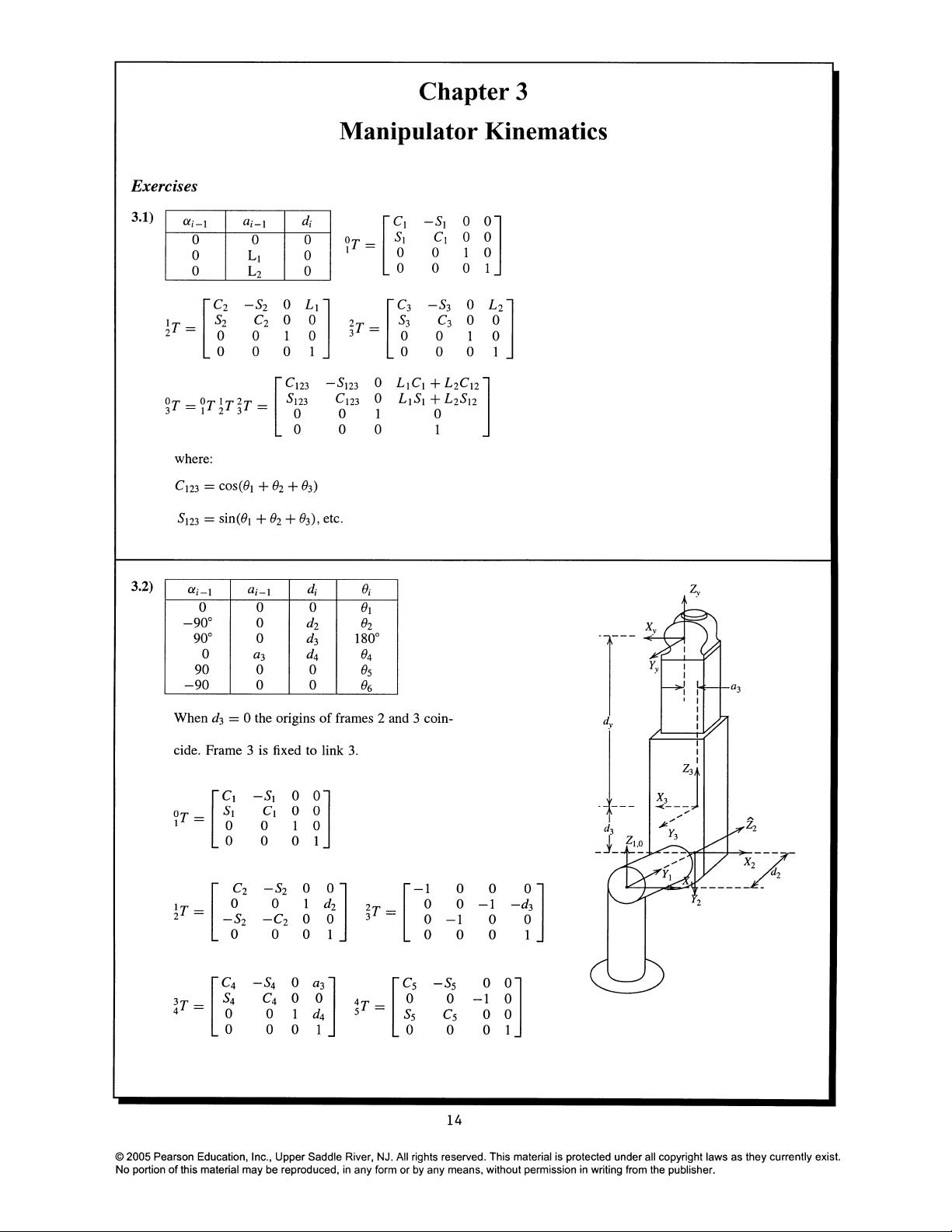
1. **机器人运动学**:这是研究机器人关节运动与末端执行器空间位置关系的学科。书中会介绍笛卡尔坐标系下的运动学方程,以及连杆机构的逆运动学解法,如DH参数法。
2. **微分运动学与静力学**:这部分内容涉及机器人的速度和加速度分析,以及机器人在不同运动状态下的受力分析。微分运动学关注机器人各关节速度和加速度如何转化为末端执行器的运动,而静力学则探讨机器人在静止或受力时的平衡条件。
3. **轨迹规划**:机器人如何从一个位置平滑地过渡到另一个位置是轨迹规划的主要课题。这可能涉及到样条函数、最优控制理论等方法来生成连续且无碰撞的路径。
4. **执行器与传感器**:机器人执行器是实现运动的装置,如电动机、液压或气压系统;传感器则是获取环境信息的关键,如力矩传感器、视觉传感器等。这部分会讨论如何选择和设计适合的执行器和传感器,以及它们在机器人系统中的作用。
5. **控制体系**:包括传统的PID控制、现代控制理论如滑模控制、自适应控制等,以及如何设计控制器来实现期望的机器人行为。
6. **机器人动力学**:深入研究机器人的动态行为,如牛顿-欧拉方程、拉格朗日方程等,用于模拟机器人的运动和力的传递。
7. **运动控制**:涵盖如何通过控制系统实现精确的定位和跟踪,以及在干扰下的稳定控制。
8. **力控制**:关注机器人与环境交互时的力和扭矩控制,例如在装配任务中需要精确施加力的场景。
9. **视觉伺服**:利用摄像头和其他视觉传感器进行实时定位和导航,实现基于视觉反馈的精确控制。
10. **移动机器人**:专门针对自主移动机器人的研究,包括路径规划、避障策略、定位与导航技术等。
11. **机器人运动规划**:在复杂环境中找到无碰撞的路径,涉及到搜索算法、随机采样技术(如RRT)等。
全书不仅讲解理论,还包含大量的实例和案例研究,通过仿真加深对理论的理解,旨在培养学生的实际操作技能。课后习题答案将帮助读者检验和巩固所学知识,确保理解和掌握这些复杂的概念和技术。



578 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
1778 浏览量

iimpact
- 粉丝: 51
 我的内容管理
展开
我的内容管理
展开







最新资源
- Windows环境下Oracle RAC集群安装步骤详解
- PSP编程入门:Lua教程详解
- GDI+ SDK详解:罕见的技术文档
- LoadRunner基础教程:企业级压力测试详解
- Crystal Reports 7:增强交叉表功能教程与设计技巧
- 软件开发文档编写指南:从需求分析到经济评估
- Delphi 使用ShellExecute API详解
- Crystal Reports 6.x 的交叉表功能与限制解析
- 掌握Linux:60个核心命令详解
- Oracle PL/SQL 存储过程详解及应用
- Linux 2.6内核基础配置详解与关键选项
- 软件工程需求与模型选择:原型化与限制
- 掌握GCC链接器ld:中文翻译与实用指南
- Ubuntu 8.04 安装与入门指南:新手快速上手必备
- 面向服务架构(SOA)与Web服务入门
- 详解Linux下GNUMake编译工具使用指南
