磁悬浮球系统模糊控制设计与实时性能分析
需积分: 13 159 浏览量
更新于2024-08-11
1
收藏 318KB PDF 举报
"模糊控制在磁悬浮球系统实时控制中的应用 (2012年) - 彭辉,徐锦华,侯海良 - 中南大学信息科学与工程学院"
本文探讨了在磁悬浮球系统中应用模糊控制技术来改善系统的动态性能和控制效果。传统的PID(比例-积分-微分)控制器在处理这类非线性、动态响应复杂的系统时往往表现不佳。作者基于模糊控制理论,设计了一种专门针对磁悬浮球系统的模糊控制器。
首先,模糊控制的优势在于它能够处理不确定性和非线性问题,这在磁悬浮球系统中尤为关键,因为该系统涉及到电磁力的精确平衡,而这种平衡往往是非线性的。通过借鉴PID控制器在实时控制中的经验,研究者确定了模糊控制器的输入(通常是误差和误差变化率)和输出(控制量)的模糊化范围,这是构建模糊规则表的基础。
接着,他们制定了合理的模糊规则,这些规则反映了系统行为的专家知识和经验,比如如何根据误差和误差变化率来调整控制力度。模糊逻辑通过将精确的数值转化为模糊集合的语言描述,使得控制器能够更加灵活地适应系统的变化。
在Matlab/Simulink环境中,他们构建了实时控制模块,这是一个强大的仿真工具,可以模拟实际系统的行为。通过该模块,他们对磁悬浮球系统进行了无干扰和有干扰条件下的实时控制实验。实验结果表明,模糊控制器能够有效地应对各种干扰,展示出良好的鲁棒性,即对系统参数变化或外部扰动的抵抗力。
此外,模糊控制器在磁悬浮球系统中的应用还证明了其在处理非线性系统时的有效性。控制效果的分析显示,相比于传统的PID控制,模糊控制器显著提高了系统的稳定性和响应速度,从而实现了更精确的磁悬浮控制。
这篇论文展示了模糊控制在解决磁悬浮球系统控制问题上的潜力,为类似非线性、高动态性的工程问题提供了一种有吸引力的控制策略。通过深入理解和应用模糊控制,工程师们能够设计出更为智能和适应性强的控制系统,以应对复杂环境下的挑战。
2009
年
5
月
第
16
卷第
3
期
文章编号:
1671-7848
(2009)
03
-0
278
-04
控制工程
Control
Engineering
of
China
模糊控制在磁悬浮球系统实时控制中的应用
彭辉,徐锦华,侯海良
(中南大学信息科学与工程学院,湖南长沙
41
∞
83
)
May
2 0 0 9
Vo
l.
16
,
No.
3
摘
要:在磁悬浮球系统中采用
PID
控制时,动态性能较差,控制效采不理想。为了获得
控制效采较好的控制器,根据模糊控制原理,设计磁悬浮模糊控制器。根据
PID
实时控制中的
经验,确定模糊控制器的输入输出交量模糊化范围,建立合理的模糊规则表。在
Matlab/Simu
link
中组建实时控制模块,并分别对磁悬浮球系统在元干扰和有干扰下进行实时控制。对控制
效果进行分析讨论,证明模糊控制器具有良好的鲁棒性和在非线性系统控制中的有效性。
关键词:磁悬浮球系统;模糊控制;实时控制;鲁棒性;有效性
中固分类号:
TP
27
文献标识码
A
Application of Fuzzy Control to Real-time Control
of Magnetic Levitation Ball System
PENG
Hui
,
XU
Jin-hua ,
HOU
Hai-liang
(School
of
Infonnation
Science & Engineering ,
Central
South
University
,
Changsha
410083 , China)
Abstract:
To the problem that the dynamic characteristic is usually not satisfactory when PID controller is applied
to
magnetic levitation
ball system
, a fuzzy controller for control of magnetic levitation system is designed based on the principle of fuzzy control. The range of
inpu
t/
output variables
and
the establishment of fuzzy control rules are decided according to the experience in the real-time
PID
control
experimen
t. The real-time module is built in the Matlab/Simulink,
and
the real-time control for magnetic levitation ball system both
without disturbance
and
with disturbance is executed. The analysis of real control results shows that the fuzzy control is effective to the
nonlinear control system.
Key
words:
magnetic levitation ball system; fuzzy control; real-time control; robustness; effectiveness
1
引
磁悬浮系统是利用磁场力与物体重力保持平衡
原理,而使物体悬浮在某一固定位置。随着电子技
术、控制工程、信号处理元件、电磁理论及新型电
磁材料的发展,磁悬浮技术得到了长足的发展。
由于磁悬浮控制系统是典型的非线性迟滞系
统,所以难以为系统建立精确的数学模型。磁悬浮
系统实时性要求很高,对于复杂的控制算法实现较
为困难,目前常用的控制策略中大多采用
PID
控
制,但传统的
PID
控制由于得不到精确的数学模
型,并且动态性能较差,所以控制效果并不理想。
而模糊控制是不需要掌握受控对象的精确数学模
型,根据人工控制规则组织控制决策表,然后由该
表决定控制量的大小,且系统的动态性能好。
基于模糊控制器的设计简单、鲁棒性好等特
点,本文介绍了磁悬浮的模糊控制器的设计和实时
控制效果分析。
收稿日期:
2
∞
7-12-10;
收修定稿日期:
2
∞
8
-04却
基金项目:国家自然科学基金资助项目
(60443008)
2
磁悬浮系统的结构及悬浮原理
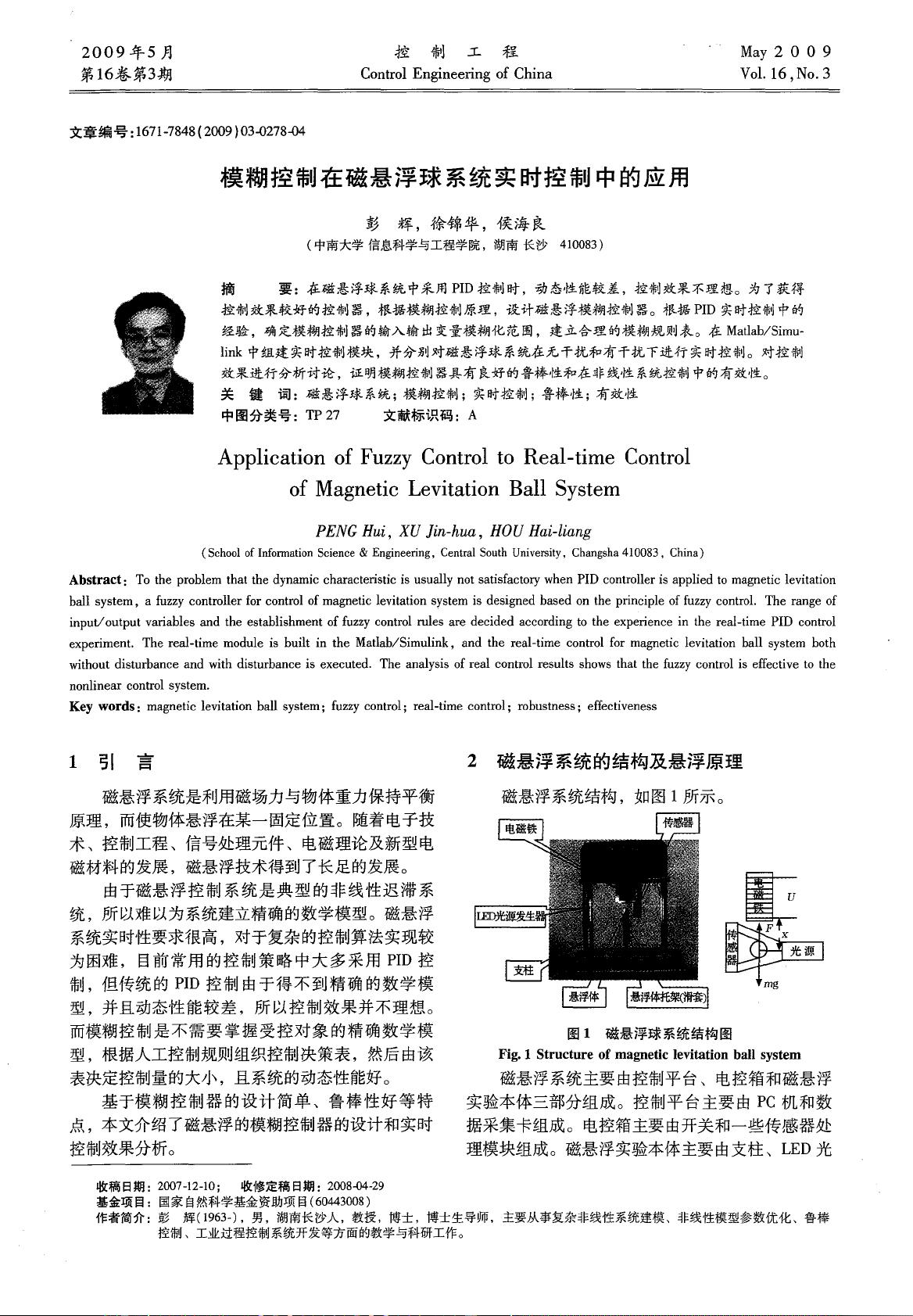
磁悬浮系统结构,如图
1
所示。
图
1
磁悬浮球系统结构图
Fig.
1
Structure
of
magnetic
levitation
b
aI
l
system
磁悬浮系统主要由控制平台、电控箱和磁悬浮
实验本体三部分组成。控制平台主要由
PC
机和数
据采集卡组成。电控箱主要由开关和一些传感器处
理模块组成。磁悬浮实验本体主要由支柱、
LED
光
作者简介:彭
辉(1
963-)
,男,湖南长沙人,教授,博士,博士生导师,主要从事复杂非线性系统建模、非线性模型参数优化、鲁棒
控制、工业过程控制系统开发等方面的教学与科研工作。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-10-17 上传
2018-12-21 上传
2021-05-10 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-10-23 上传
2021-01-13 上传

weixin_38553478
- 粉丝: 7
- 资源: 924
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
