"ReSI-BOT:可重构的六自由度混合并联机器臂的研究与优化"
137 浏览量
更新于2024-01-28
收藏 932KB DOCX 举报
机器人与计算机集成制造——一个六自由度可重构的混合并联机器臂
本文介绍了一种名为ReSI-BOT的可重构混合并联机器人的案例研究。该机器人解决了可重构6自由度并行机构的问题,同时具有自重构的架构。文章详细讨论了该系统的运动学、工作区取向、奇点和刚度等方面的分析。此外,文章还讨论了该架构的一些独特功能。
首先,本文简要介绍了机器人研究的背景和发展历程。近几十年来,机器人已经成为研究者们的热点领域。串行机器人在不同应用领域取得了一些进展,但并联机器人开始展现其优势。并联机构(PMs)相比于串行机构具有许多优势,如高载荷/重量比、速度、精度、刚度和低惯性。一些研究文献中提出了许多与并联机器人相关的参数。在大型平行配置目录中可以找到这些参数。然而,并联机器人的发展比串行机器人更加复杂,普遍存在的缺点是工作空间比较小且运动奇异点较难处理。
接下来,本文详细介绍了ReSI-BOT机器人的设计和特点。该机器人采用可重构的混合并联结构,具有六自由度。这意味着它可以实现灵活的运动并满足多种工作要求。为了实现对该机器人的系统分析,本文介绍了运动学、常数取向工作区、奇点和刚度等相关概念。通过对这些概念的详细研究,揭示了该机器人架构的一些独特功能。
本文还研究了多目标优化过程中的性能指标。加权刚度、灵活性和工作空间体积被视为衡量机器人性能的关键指标。作者详细介绍了如何在设计优化中考虑这些指标,并探讨了设计优化中可行的方法。通过综合考虑这些性能指标,可以设计出性能更好、更适合不同应用的机器人。
最后,本文结合案例研究结果对ReSI-BOT机器人进行了评估和讨论。通过对机器人的性能进行实际测试和模拟仿真,可以验证其设计和性能是否满足实际需求。研究人员还对ReSI-BOT机器人的优势和潜在应用进行了讨论。
综上所述,本文提出了一种可重构的混合并联机器人的案例研究,即ReSI-BOT。通过系统分析和设计优化,该机器人具有灵活性、高刚度和较大的工作空间体积。该研究为混合并联机器人的发展提供了新的思路和方法,对于实现机器人与计算机集成制造具有重要意义。未来的研究可以进一步深入探讨机器人的控制算法和自适应能力,以实现更高程度的自主操作和智能化生产。
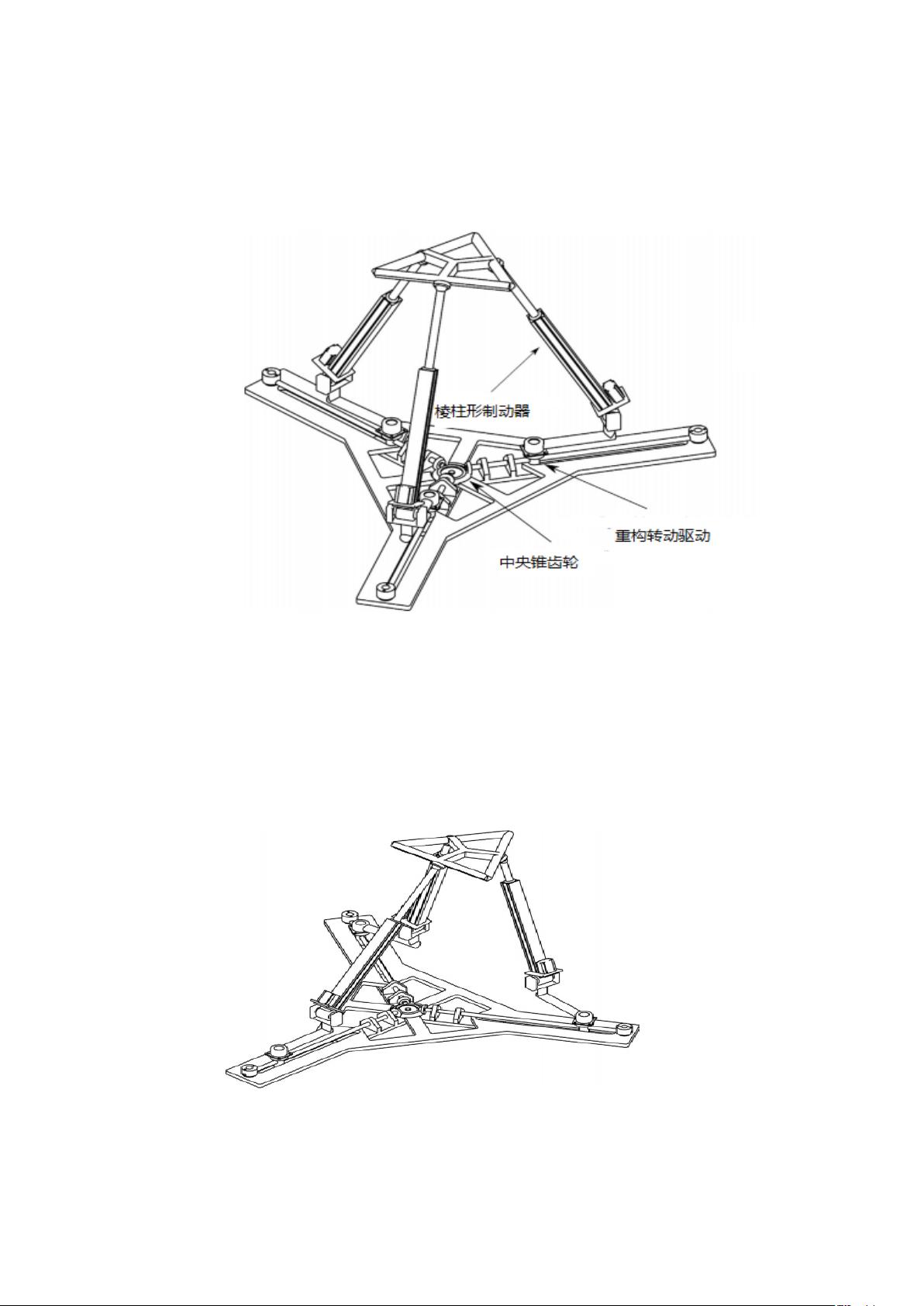
机械臂能够重构。如图 1 所示,重构的主要驱动是中央圆锥齿轮。这个中心锥齿轮带
动其他三个锥齿轮,这三个锥齿轮分别连接到一个梯形螺纹系统,该系统驱动第一旋
转关节的垂直轴和整个第一环节。
图 1 并联机器臂设计(配置 A)
摆杆并联机器人缩写为 ReSl-Bot。重要地是,由于机器人的固有的设计,一旦
第一个转动关节的垂直轴足够地驱动基地的外部,摆杆必须旋转
180
0
以提供了一个
有趣的选择配置。在本文中,这只是表示配置 B 与图 1 中 A 相对。在图 2 中,随着移
动平台插图中心。此配置的一个详细的渲染可以观察到。
图 2 并联机器臂设计(配置 B)
根据 ReSl-Bot 的机动性得到了著名的 Grübler 方程
剩余19页未读,继续阅读









