RouterOS中文教程:最全详尽的指南
"ROS教程,最全最详的中文教程,详细介绍了ROS从安装到详细配置的知识"
ROS,即Robot Operating System(机器人操作系统),是一种专为机器人设备和软件设计的开源操作系统。它提供了构建机器人软件应用程序所需的工具和库,包括硬件抽象、低级设备控制、实施常用功能的中间件、消息传递机制、软件包管理和开发工具等。ROS并不是一个传统的操作系统,而是一个操作系统框架,允许开发者专注于机器人的智能和行为,而不是底层通信和基础设施。
在ROS教程中,通常会涵盖以下关键知识点:
1. **ROS安装**:ROS的安装通常涉及设置工作空间、安装依赖、获取源代码以及编译环境。教程会指导用户在Ubuntu或其它支持的Linux发行版上安装ROS,并设置好必要的开发环境。
2. **ROS基础知识**:这包括ROS节点、话题、服务、参数、包等核心概念的解释。节点是ROS中的进程,负责执行特定任务;话题是节点之间通信的渠道,允许数据在节点间传递;服务则是一次性请求-响应交互;参数服务器存储共享参数;包是ROS的基本组织单元,包含源代码、配置文件等。
3. **ROS通信**:ROS提供了多种通信方式,如`rospy`用于Python编程,`roscpp`用于C++。教程将详细介绍如何创建和使用话题、服务以及如何调试通信问题。
4. **ROS编程**:教程会教授如何编写ROS节点,包括创建新包、编写节点代码、发布和订阅话题、实现服务等。
5. **ROS图形化工具**:ROS的可视化工具如`rqt`, `rviz`等,可以帮助开发者调试和理解机器人系统。教程会展示如何使用这些工具来查看话题数据、构建三维场景和调试系统。
6. **ROS传感器和Actuators**:ROS提供了许多库来处理不同类型传感器(如摄像头、激光雷达)和执行器的数据。教程会介绍如何使用这些库读取和处理传感器数据,以及控制机器人的运动。
7. **ROS导航栈**:ROS的导航堆栈是一套用于实现自主移动机器人路径规划和定位的工具。教程将解释如何配置和使用这个堆栈,包括全局路径规划、局部路径规划和避障。
8. **ROS仿真**:Gazebo是一个常用的ROS仿真环境,允许开发者在虚拟环境中测试机器人行为。教程会介绍如何设置和使用Gazebo,以及如何导入和控制机器人模型。
9. **ROS配置和调试**:ROS允许通过XML配置文件调整节点和系统的设置。教程将涵盖如何编写和修改这些配置文件,以及如何使用`rosbag`记录和回放数据进行调试。
10. **ROS实践项目**:教程通常会包含一些实践项目,如创建一个简单的自动驾驶小车或实现一个自动避障的机器人,以帮助学习者将理论知识应用于实际场景。
ROS教程旨在提供全面的指导,帮助学习者从零开始掌握ROS的各个方面,无论他们是机器人领域的初学者,还是希望提升ROS技能的专业人士。通过深入学习和实践,开发者可以利用ROS的强大功能构建复杂、灵活的机器人系统。
RouterOS 中文教程
此教程用于学习,严谨任何个人、组织和公司用于商业用途!
- YuS - 16 -
在路由器启动完成后,会发出连续两声短触“嘀嘀”的明鸣音,之后在显示屏上,出现登录的提示,如果在终端
显示中,没有提示任何信息,需要检查一下网线或是串口线是否连接好。
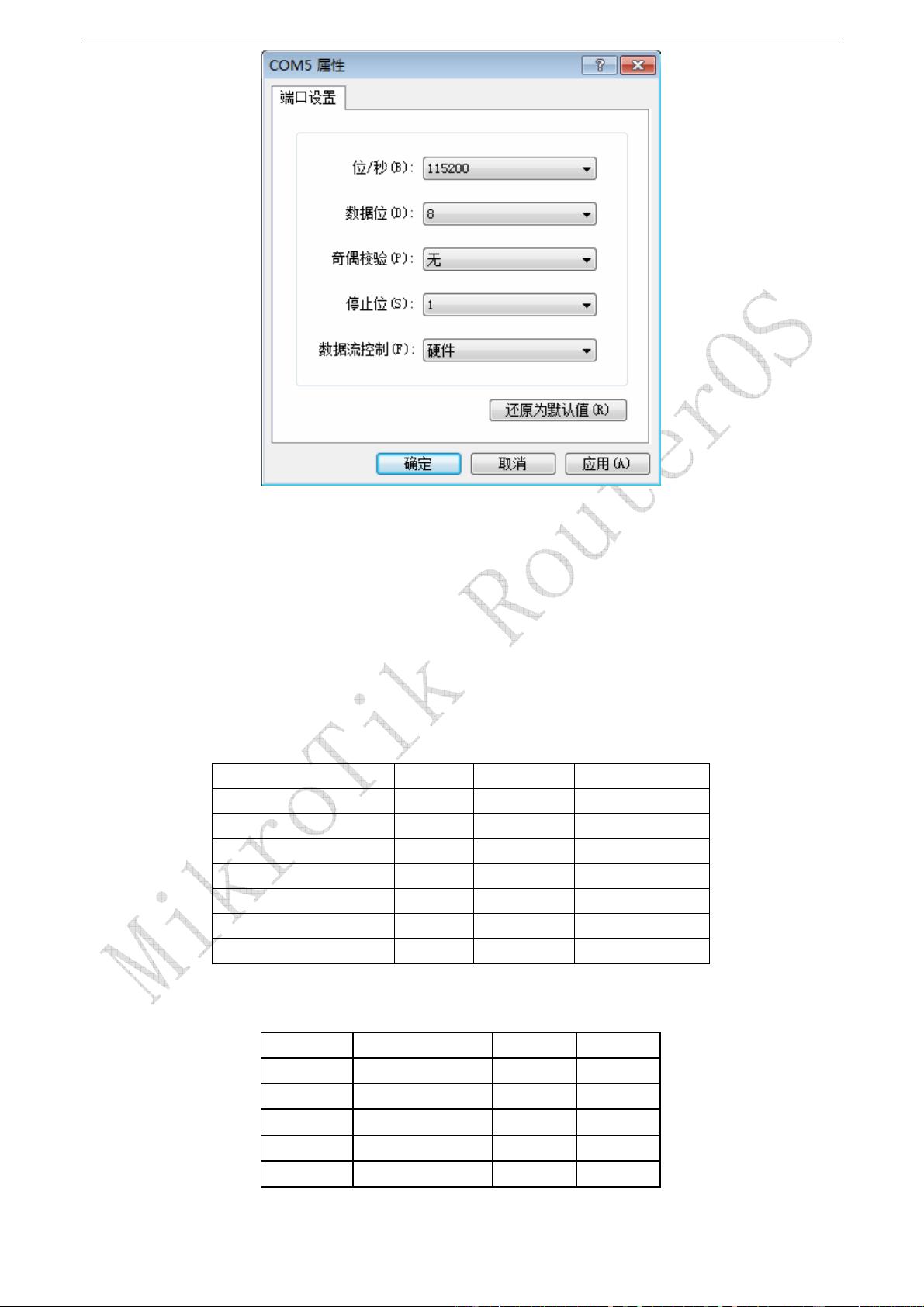
串口控制(管理端)功能允许通过一个 MikroTik Router 串行接口访问路由器的串口终端控台一个特殊的串行
接口线通过工作站或者便携式电脑的串口(COM)连接到路由器的串口。在 windows 电脑上常用的串口连接
程序是超级终端(HyperTerminal)。
串口控制线配置
基于 PC 的 RouterOS 的 DB9 串口线序排列如下:
Router Side (DB9f) Signal Direction Side (DB9f)
1, 6 CD, DSR IN 4
2 RxD IN 3
3 TxD OUT 2
4 DTR OUT 1, 6
5 GND - 5
7 RTS OUT 8
8 CTS IN 7
基于 RouterBOARD 系列的串口线序如下:
DB9f 功能 DB9f DB25f
1+4+6 CD+DTR+DSR 1+4+6 6+8+20
2 RxD 3 2
3 xD 2 3
5 GND 5 7
7+8 RTS+CTS 7+8 4+5
注:
MikroTik RouterOS 需要定义以上的串口线序,才可以正常通信。



剩余321页未读,继续阅读
2019-12-17 上传
2020-10-01 上传
2013-04-05 上传
2010-12-09 上传
2013-01-27 上传
2012-11-11 上传

信息科技云课堂
- 粉丝: 907
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
