不确定控制系统稳定性裕度计算方法比较
需积分: 5 115 浏览量
更新于2024-08-12
收藏 277KB PDF 举报
"这篇2009年的论文探讨了不确定控制系统稳定性裕度的计算方法,主要关注如何确保控制系统的稳定性。作者是来自北京理工大学自动控制系的Bin LÜ和Qinghe WU。文章总结并比较了四种用于计算区间植物族稳定性裕度的方法,包括μ方法、特征值方法以及MATLAB的robuststab函数。"
在控制系统的工程设计中,系统的稳定性是至关重要的。这篇论文主要聚焦于如何评估和保证控制系统的稳定性,特别是对于存在不确定性的系统。不确定性可能来源于模型参数的变化、外部扰动或非线性效应等因素。稳定性裕度是衡量系统稳定程度的一个关键指标,它量化了系统能够承受的最大不确定性或扰动幅度而不丧失稳定性。
论文首先介绍了μ分析方法,这种方法可以提供稳定性裕度的边界估计,通过数值计算能得到较好的结果。μ方法是一种基于H无穷范数的分析工具,它可以量化系统对不确定性或扰动的鲁棒性。
其次,论文讨论了特征值方法。这种方法能够给出准确的稳定性裕度值,因为它直接处理系统矩阵的特征值,从而能精确地分析系统的动态行为。特征值方法在计算效率和准确性之间找到了良好的平衡,因此被推荐用于稳定性裕度的计算。
然而,论文指出MATLAB的robuststab函数在某些情况下可能会提供不准确的结果。尽管该函数通常用于评估系统对不确定性的鲁棒性,但其可靠性在特定条件下可能不足,因此在实际应用中应谨慎使用。
关键词包括“区间植物族”(指具有不确定性的系统模型)、“稳定性裕度”和“MATLAB的robuststab函数”,这些都突显了论文的研究焦点。论文的引言部分强调了控制系统设计中稳定性的重要性,并指出当系统不受不稳定因素影响时,设计的首要任务就是确保系统的稳定性。
这篇论文为设计者提供了一种评估和比较不确定控制系统稳定性裕度的框架,强调了特征值方法的优势,并提醒了使用MATLAB的robuststab函数时可能出现的问题。这些方法和观察对于进行稳健控制系统设计的工程师和研究人员来说具有很高的参考价值。
J Control Theory Appl 2009 7 (4) 427–432
DOI 10.1007/s11768-009-8071-9
Stability margin of uncertain control systems
Bin L
¨
U, Qinghe WU
(
Department of Automatic Control, Beijing Institute of Technology, Beijing 100081, China)
Abstract: Achieving stability is the essential issue in the control system design. In this paper, four approaches that can
be used to calculate the stability margin of the interval plant family are summarized and compared. The μ approach gives the
bounds of the stability margin, and good estimation can be obtained with the numerical method. The eigenvalue approach
yields accurate value, and the MATLAB’s function robuststab sometimes provides wrong results. Since the eigenvalue
approach is both accurate and computationally efficient, it is recommended for the calculation of the stability margin, while
utilization of the function robuststab should be avoided due to the unreliable results it gives.
Keywords: Interval plant family; Stability margin; Stability radius; MATLAB’s function robuststab
1 Introduction
A critical issue in the process of control system design
is to achieve stability. If the plant is free of unstable pole-
zero cancellation, there must exist a controller such that the
closed loop system is stable. However, this controller may
be unreliable, because the models of the system may be in-
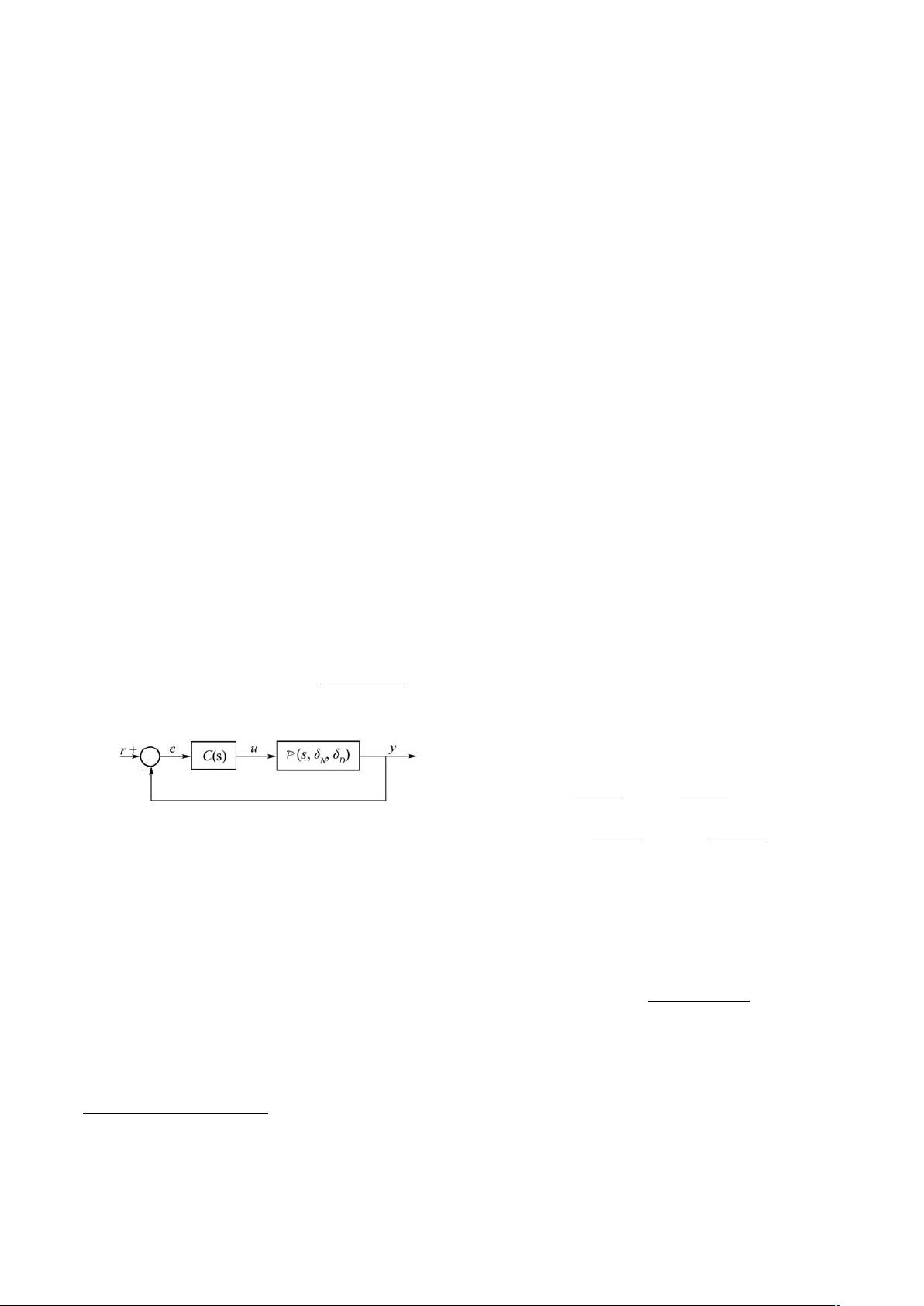
accurate. In most situations, we consider the control system
shown in Fig.1, where P(s, δ
N
, δ
D
) is the plant to be con-
trolled, δ
N
, δ
D
are the uncertainty parameter vectors of the
plant, and C(s) is the controller. We can assume that the
plant to be controlled is a family of interval plants:
P(s, δ
N
, δ
D
)=
P (s):P (s)=
n
j=0
[b
−
j
,b
+
j
]s
j
n
i=0
[a
−
i
,a
+
i
]s
i
. (1)
Fig. 1 A control system.
The robust stabilization problem associated with
P(s, δ
N
, δ
D
) is to find a single proper controller C(s),
meaning both the structure and the parameters of C(s)
are invariant, such that the negative feedback system com-
posed of P(s, δ
N
, δ
D
), and C(s) is internally stable for all
P (s) ∈P(s, δ
N
, δ
D
). This problem has been studied for a
long time, and some celebrated results have been obtained.
Chapellat and Bhattacharyya showed that a given controller
stabilizes the whole interval plant family if it stabilizes its
32 edge plants [1]. Barmish et al. showed further that an
interval plant family is robustly stabilized by a first-order
compensator if and only if the compensator stabilizes six-
teen of the extreme plants [2].
The above approaches can only be used to check the
stabilization condition of controllers. A further need is to
calculate the stability margin of the uncertain system, so
that the quality of the controller can be evaluated. Several
approaches have been proposed for this purpose, such as
the structured singular value (μ) approach, the numerical
method, the analytical eigenvalue approach, and the MAT-
LAB 2007b’s function, robuststab. With the increasing ap-
plication of computers and the development of numerical
software, MATLAB is extensively used by researchers. The
results obtained with MATLAB are almost always accurate
and sound, which results in heavy dependence on MATLAB
for engineering applications. However, the function robust-
stab of MATLAB 2007b often gives erroneous, and even
sometimes unreasonable results. In this paper, we summa-
rize these approaches and present examples illustrating in-
correct results obtained with MATLAB.
2 Definition of stability radius
To this end, we represent the interval plant family
P(s, δ
N
, δ
D
) in an equivalent form. Define
b
j
=
b
+
j
+ b
−
j
2
,a
i
=
a
+
i
+ a
−
i
2
,
w
N,j
=
b
+
j
− b
−
j
2
,w
D,i
=
a
+
i
− a
−
i
2
,
then the coefficient intervals can be represented as
[b
−
j
,b
+
j
]=b
j
+ w
N,j
δ
N,j
, − 1 δ
N,j
1,
[a
−
i
,a
+
i
]=a
i
+ w
D,i
δ
D,i
, − 1 δ
D,i
1.
Hence,
P(s, δ
N
, δ
D
)=
N
0
(s)+Δ
N
(s)
D
0
(s)+Δ
D
(s)
, (2)
where
N
0
(s)=b
n
s
n
+ b
n−1
s
n−1
+ ···+ b
1
s + b
0
,
D
0
(s)=a
n
s
n
+ a
n−1
s
n−1
+ ···+ a
1
s + a
0
,
Received 24 April 2008; revised 19 November 2008.
This work was supported by the National Natural Science Foundation of China (No.69574003, 69904003) and the Research Fund for the Doctoral
Program of the Higher Education (RFDP) (No.1999000701), and was partly supported by the Advanced Weapons Research Supporting Fund
(No.YJ0267016).
下载后可阅读完整内容,剩余5页未读,立即下载
2016-08-29 上传
2017-12-11 上传
2021-02-20 上传
2021-05-11 上传
2020-11-10 上传
2021-02-11 上传
2021-02-20 上传
2020-01-29 上传
2021-02-07 上传

weixin_38690407
- 粉丝: 1
- 资源: 943
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
