




单片机与DSP中步进电机的细分控制解析
PDF格式 | 201KB |
更新于2024-08-29
| 63 浏览量 | 举报
"单片机与DSP中的单片机与步进电机细分控制"
在单片机与DSP应用中,步进电机作为一种重要的执行元件,因其独特的数字控制特性被广泛用于精确定位和运动控制领域。步进电机能够将电脉冲信号转化为精确的机械角度移动,这种特性使得它非常适合与单片机配合工作。步进电机的基本工作原理是,每个脉冲信号驱动电机转过一个固定的角度,称为步距角,从而确保了在没有累计误差的情况下的精确位置控制。
步进电机的特点包括:
1. 角位移与脉冲数成正比:步进电机的转动角度严格对应于接收到的脉冲数量,因此在一圈后,电机的位置与脉冲数完全匹配,无累积误差。
2. 开环控制系统:步进电机与驱动电路组成的开环系统简单、经济且可靠性高。此外,通过添加角度反馈机制,可以构建更高级别的闭环数控系统,以提高系统的稳定性和精度。
3. 快速响应:步进电机具备快速启动、停止和改变方向的能力,这得益于其良好的动态性能。
4. 广泛的速度调整范围:即使在低速下,步进电机也能提供较大的扭矩,通常可以直接驱动负载,无需减速器。
5. 脉冲电源供电:步进电机需要通过脉冲电压驱动,不能直接使用交流或直流电源。
6. 振荡与失步问题:在某些情况下,步进电机可能出现振荡或失步,需要适当的控制策略和负载匹配来优化性能。
步进电机的工作方式主要有整步和半步两种。整步方式下,电机每次收到脉冲,会转过一个完整的步距角;而在半步方式下,电机每次旋转的角度是整步方式的一半,这样可以进一步提高位置分辨率。例如,一个1.8度步距角的四相混合式步进电机,在整步模式下需要200个脉冲完成一圈,而在半步模式下则需要400个脉冲。为了控制步进电机,需要按照特定的时序向电机的引线发送脉冲,不同的时序决定了电机的运行方式。
在实际应用中,通过单片机或者DSP进行步进电机的细分控制,可以进一步减小步距角,提高定位精度。细分控制技术通过改变电机相电流的波形,使得电机的实际转动角度小于基本步距角,实现更平滑的旋转,减少振动,提高系统整体的稳定性。这种方法对于要求高精度和低振动的应用场合尤其重要,如自动化设备、精密仪器和3D打印机等。
在设计和实施步进电机的控制程序时,单片机或DSP需要精确地生成脉冲序列,并按照特定的顺序控制电机各相的通断,以达到所需的步进模式。此外,为了防止电机过热和过载,还应考虑电流限制和速度控制算法,确保电机在各种工作条件下都能稳定运行。单片机和DSP在步进电机控制中的应用结合了数字信号处理的优势,实现了高效、精准的运动控制。
单片机与单片机与DSP中的单片机与步进电机细分控制中的单片机与步进电机细分控制
1 步进电机 步进电动机是纯粹的数字控制电动机,它将电脉冲信号转变为角位移,即给一个脉冲,步进电
机就转一个角度,因此非常合适单片机控制,在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号
的频率和脉冲数,而不受负载变化的影响,电机则转过一个步距角,同时步进电机只有周期性的无累积误差,
精度高。 步进电动机有如下特点: 1)步进电动机的角位移与输入脉冲数严格成正比。因此,当它转
一圈后,没有累计误差,具有良好的跟随性。 2)由步进电动机与驱动电路组成的开环数控系统,既简单、
廉价,又非常可靠,同时,它也可以与角度反馈环节组成高性能的闭环数控系统。 3)步进电动机的动态
1 步进电机
步进电动机是纯粹的数字控制电动机,它将电脉冲信号转变为角位移,即给一个脉冲,步进电机就转一个角度,因此非常
合适单片机控制,在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,
电机则转过一个步距角,同时步进电机只有周期性的无累积误差,精度高。
步进电动机有如下特点:
1)步进电动机的角位移与输入脉冲数严格成正比。因此,当它转一圈后,没有累计误差,具有良好的跟随性。
2)由步进电动机与驱动电路组成的开环数控系统,既简单、廉价,又非常可靠,同时,它也可以与角度反馈环节组成高
性能的闭环数控系统。
3)步进电动机的动态响应快,易于启停、正反转及变速。
4)速度可在相当宽的范围内平稳调整,低速下仍能获得较大转距,因此一般可以不用减速器而直接驱动负载。
5)步进电机只能通过脉冲电源供电才能运行,不能直接使用交流电源和直流电源。
6)步进电机存在振荡和失步现象,必须对控制系统和机械负载采取相应措施。
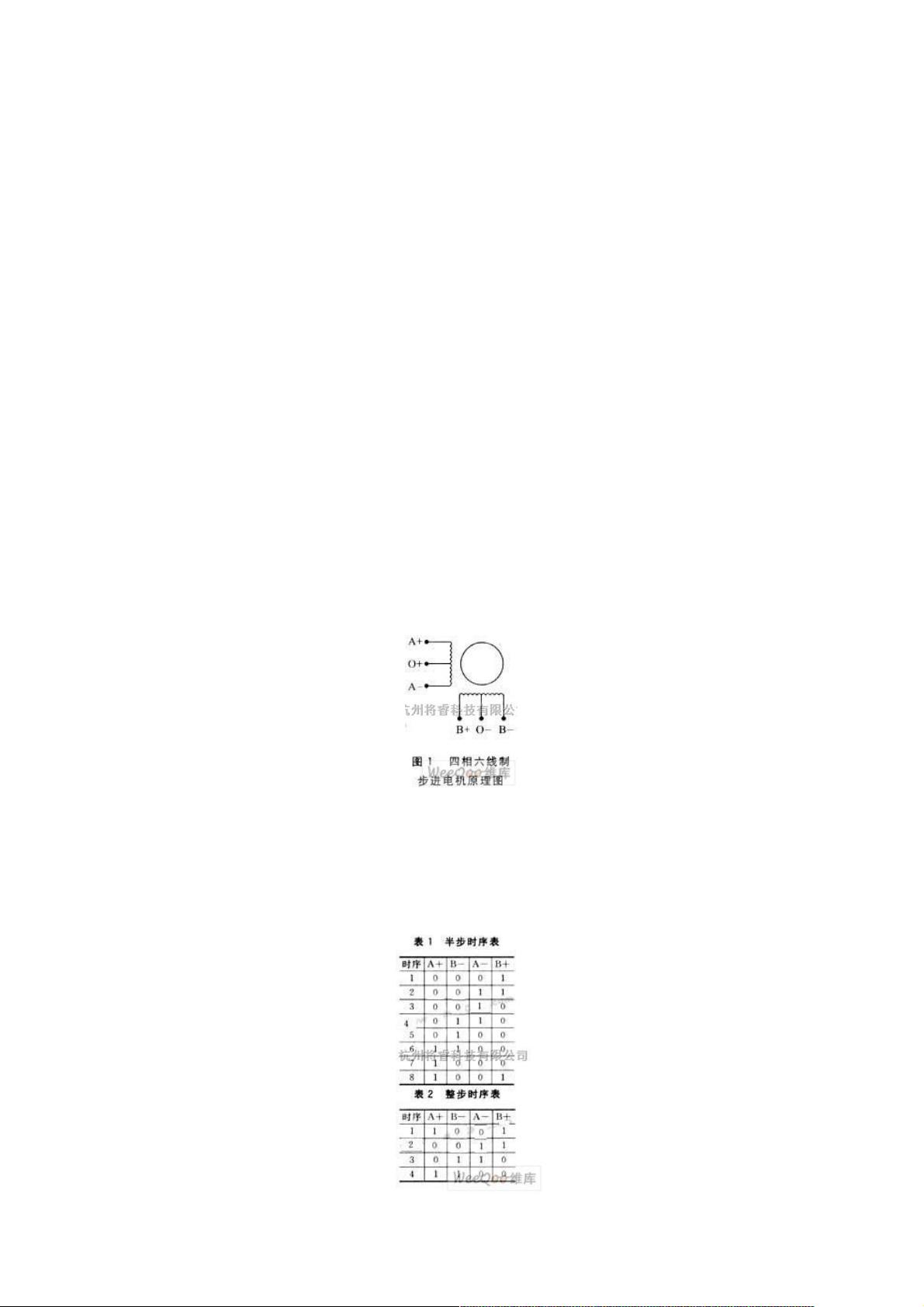
步进电机具有和机械结构简单的优点,图1是四相六线制步进电机原理图,这类步进电机既可作为四相电机使用,也可以
做为两相电机使用,使用灵活,因此应用广泛。
步进电机有两种工作方式:整步方式和半步方式。以步进角1.8度四相混合式步进电机为例,在整步方式下,步进电机每
接收一个脉冲,旋转1.8度,旋转一周,则需要200个脉冲,在半步方式下,步进电机每接收一个脉冲,旋转0.9度,旋转一
周,则需要400个脉冲。控制步进电机旋转必须按一定时序对步进电机引线输入脉冲,以上述四相六线制步进电机为例,其半
步工作方式和整步工作方式的控制时序如表1和表2所列。
步进电机在低频工作时,会有振动大、噪声大的缺点。如果使用细分方式,就能很好的解决这个问题,步进电机的细分控
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐



weixin_38556737
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开








最新资源
- 纯ReactJS打造的待办事项管理器:项目实践解析
- 掌握韩语中级语法:过去时、理由表达与时间推测
- Galaxy Nexus快速启动与刷机教程
- 探索无限制版Vagaa的独特魅力与功能
- 实践中的软件项目管理英文版
- C#开发的WIA程序实现与应用指南
- MFC控制下的Kinect骨架识别技术与实践
- kimi_python_common:Python通用功能库详解
- 全面解读最新版EditPlus文本编辑器
- 安卓新手入门记事本源码,全面学习Andriod基础
- PHP购物车源码:AJAX技术实现动态购物车功能
- 微软研究院立体匹配代码解析及初学者指南
- ColorSpy:高效的颜色拾取工具介绍
- net实现的学生选课管理系统
- Delphi实现汉字拼音简码转换技术分享
- 项目1案例分析:深入研究与应用






















