NNC-PID控制器:电液位置伺服系统的DSP智能控制解决方案
125 浏览量
更新于2024-08-31
收藏 333KB PDF 举报
电液位置伺服控制系统是一种复杂的系统,其特点包括非线性、不确定性、时变性、外界干扰和交叉耦合干扰,这使得精确建模和传统控制方法面临挑战。PID控制器作为基础控制策略,虽然结构简单、参数易于理解且具有良好的动态和静态特性,但对于处理这种系统的复杂性却有所局限。
人工神经网络(NNC)作为一种智能控制手段,拥有强大的信息处理能力,包括自适应学习和逼近非线性功能,使其在处理难以模型化的系统方面表现出色。然而,NNC的缺点在于可能陷入局部最优,难以找到全局最佳控制策略。
为了克服这些局限,本文提出了结合NNC与PID的智能控制器——NNC-PID控制器,旨在通过利用NNC的自适应性和PID的稳定性,实现对电液位置伺服系统的更高效控制。这种创新方法特别强调了实时性和精度,这对于电液伺服系统,如喷漆机械手的第一关节控制,至关重要。
该研究实验装置以喷漆机械手的第一关节为例,构建了一个包括精密导电塑料电位计作为反馈器件的控制系统。核心硬件部分采用了TI公司的TMS320F2812 DSP,这是一款高性能的数字信号处理器,具有高速运算能力、大容量存储器和丰富的外部接口,支持高级数据转换和灵活的I/O配置。系统中还包括12位A/D转换器和D/A转换器、信号调理电路、输出放大驱动电路,以及上位机PC等组件,共同确保了系统能够快速响应和精确控制。
通过对NNC-PID控制器在DSP平台上的实现,研究者期望能够有效地解决电液位置伺服系统中的复杂控制问题,提高系统的稳定性和响应速度,满足高精度和实时性的要求。这一工作不仅推动了电液伺服技术的发展,也为其他领域的智能控制系统设计提供了新的思路和实践案例。
单片机与单片机与DSP中的中的NNC-PID控制器对电液位置控制系统的控制器对电液位置控制系统的DSP
实现实现
电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统精确的数
学模型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。 常规PID控制器具有结构简
单、参数意义明确、控制的动态和静态特性优良等特点。人工神经网络(NNC)具有信息综合、学习记忆和自适应
能力、逼近任意非线性函数的能力,可以处理那些难以用模型和规则描述的过程,但也存在局部最小点,不易
达到最优控制。 将NNC与PID控制相结合组成智能控制器可以取得更好的控制效果,这里提出采用DSP实
现NNC-PID控制器对电液位置系统进行智能控制,满足电液位置伺服对控制系统响应快和高精度的要求。
电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易
建立。因此,对电液系统的控制一直是一个复杂控制系统问题。
常规PID控制器具有结构简单、参数意义明确、控制的动态和静态特性优良等特点。人工神经网络(NNC)具有信息综合、
学习记忆和自适应能力、逼近任意非线性函数的能力,可以处理那些难以用模型和规则描述的过程,但也存在局部最小点,不
易达到最优控制。
将NNC与PID控制相结合组成智能控制器可以取得更好的控制效果,这里提出采用DSP实现NNC-PID控制器对电液位置
系统进行智能控制,满足电液位置伺服对控制系统响应快和高精度的要求。
1 电液位置伺服系统构成电液位置伺服系统构成
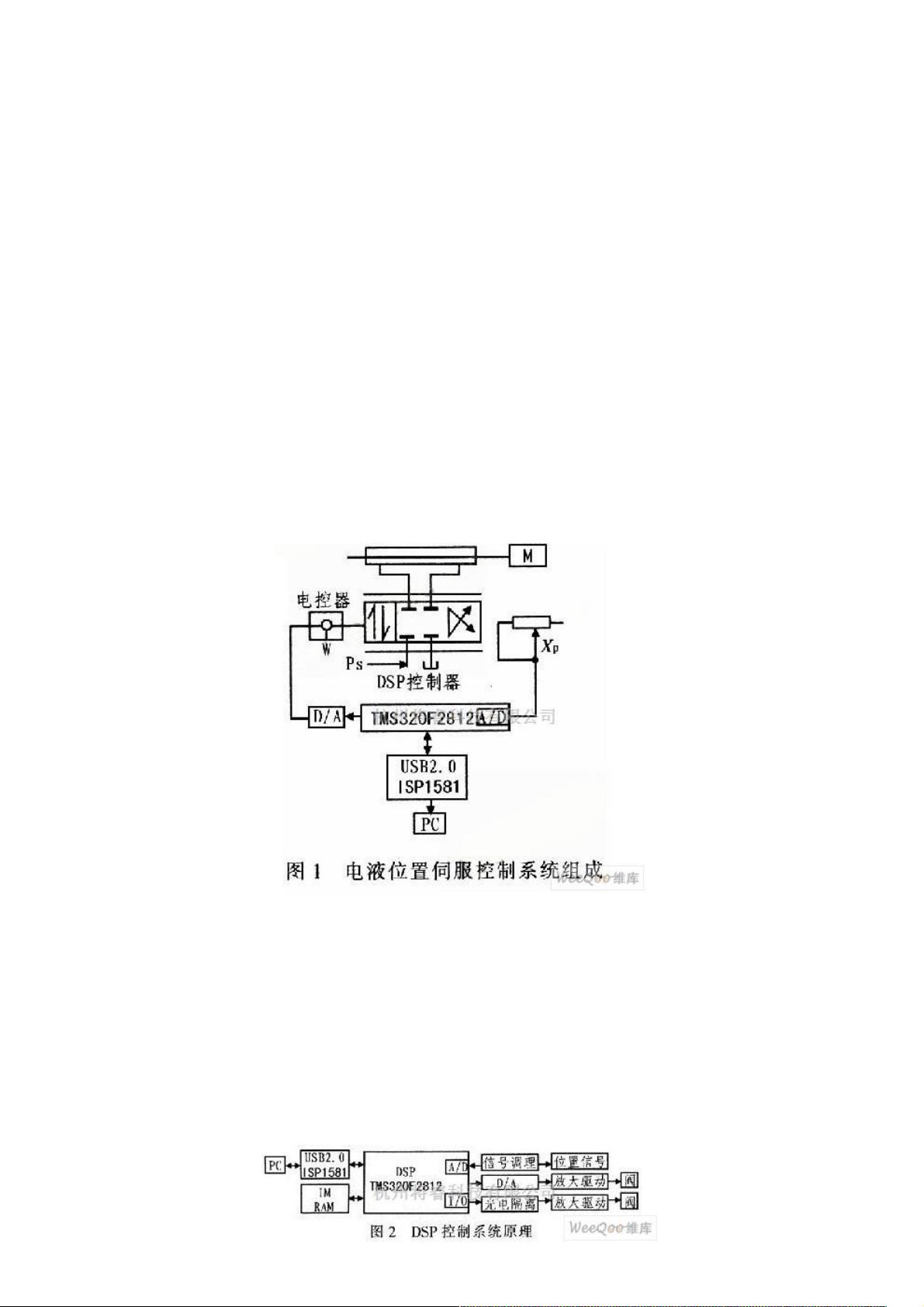
以喷漆机械手第一关节为对象,构造了研究实验装置,如图1所示。其中反馈器件采用精密导电塑料电位计。整个控制系
统以DSP为核心、由喷漆机械手第一关节、位置传感器、12位A/D转换器和D/A转换器、信号调理电路和输出放大驱动电路以
及上位机PC等组成,实现定位和伺服跟踪控制。
2 控制系统硬件设计控制系统硬件设计
TMS320F2812是TI公司推出的2000系列的数字信号处理(DSP),主要应用在控制领域。频率达150 MHz,定点32位的
CPU,可运行16×16和32×32的运算。片上高达128 KB的程序存储器,128 KB的ROM和18 KB的SARAM,外部接口16位数
据线和19位地址线,可外扩l MB的ROM。此外还集成有16通道的12位的A/D转换器,最小化周期80 ns,以及56个可单独编程
的通用I/0(GPIO)引脚。高速的数字信号处理能力及丰富的外扩资源使TMS320F2812适合应用在要求较高的控制系统。
2.1 控制系统总体结构控制系统总体结构
控制系统采用了PC+DSP的控制方案,系统总体结构如图2所示。其中PC机主要用来显示控制界面,调节各控制参数,实
时显示各相关信号。而DSP则完成低层的控制功能,通过A/D转换器采集各路信号,经过一定的算法处理后,由D/A口输出,
以及通过I/0口、光电隔离驱动放大电路来控制各电磁阀的开关。同时通过通信,向PC机发送采集来的信号,并接收PC机的起
动、停止等指令以及各控制参数。
下载后可阅读完整内容,剩余4页未读,立即下载
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传

weixin_38630091
- 粉丝: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 小学水墨风学校网站模板设计
- 深入理解线程池的实现原理与应用
- MSP430编程代码集锦:实用例程源码分享
- 绿色大图幻灯商务响应式企业网站开发源码包
- 深入理解CSS与Web标准的专业解决方案
- Qt/C++集成Google拼音输入法演示Demo
- Apache Hive 0.13.1 版本安装包详解
- 百度地图范围标注技术及应用
- 打造个性化的Windows 8锁屏体验
- Atlantis移动应用开发深度解析
- ASP.NET实验教程:源代码详细解析与实践
- 2012年工业观察杂志完整版
- 全国综合缴费营业厅系统11.5:一站式缴费与运营管理解决方案
- JAVA原生实现HTTP请求的简易指南
- 便携PDF浏览器:随时随地快速查看文档
- VTF格式图片编辑工具:深入起源引擎贴图修改
