ROS项目结构:工作目录与Package详解
需积分: 0 113 浏览量
更新于2024-08-05
收藏 524KB PDF 举报
在ROS(Robot Operating System)开发环境中,文件系统结构是一个关键组成部分,它有助于组织和管理复杂的代码库。工作目录结构(Workspace)是项目的核心概念,它模仿了企业的部门结构,以便于团队协作和项目管理。
标准的ROS Workspace结构包括以下几个主要部分:
1. **workspace**:工作空间是项目的根目录,类似于一个公司的总部,用于存放整个项目的所有相关信息和代码。它包含了其他几个关键子目录。
2. **build**:这个目录是编译结果的输出地,ROS工具会在这里生成可执行文件和其他编译产物,开发者通常无需直接干预。
3. **devel**:开发目录,存放编译后的中间文件、头文件和库,供开发环境使用。开发者在此进行源码的编译和测试,但不是每次编译都需要更新,除非有新的修改。
4. **src**:源代码目录,是所有package(工作单元或功能模块)的存储区。每个package都是一个独立的功能模块,如camera视觉包、hardware硬件包和motion控制包,负责特定的功能如视频处理、硬件控制和路径规划。
- **package**:ROS项目中的核心组成部分,每个package都有自己的命名(如pkg1、pkg2和pkg3),并且包含以下基本文件:
- `CMakeLists.txt`:这个文件是构建脚本,用于指定编译选项、依赖关系等,是构建过程的关键驱动。
- `include`:存放公共头文件,供package内的各个模块引用。
- `package.xml`:元数据文件,定义了package的基本信息,如名称、版本、依赖关系等。
在大型ROS项目中,遵循清晰的组织结构和规范至关重要,这有助于团队成员之间的协作和维护项目的稳定性。通过将项目拆分为独立的package,可以根据功能模块的逻辑进行管理,确保代码的复用和模块化。
理解并管理好ROS的工作目录结构对于项目的成功至关重要,它不仅有助于保持代码的整洁,还提高了代码的可读性和可维护性。在实际工作中,开发者需要熟悉这些目录的作用,并遵循良好的编程实践来组织他们的代码和package,以实现高效、有序的开发流程。
工作目录结构
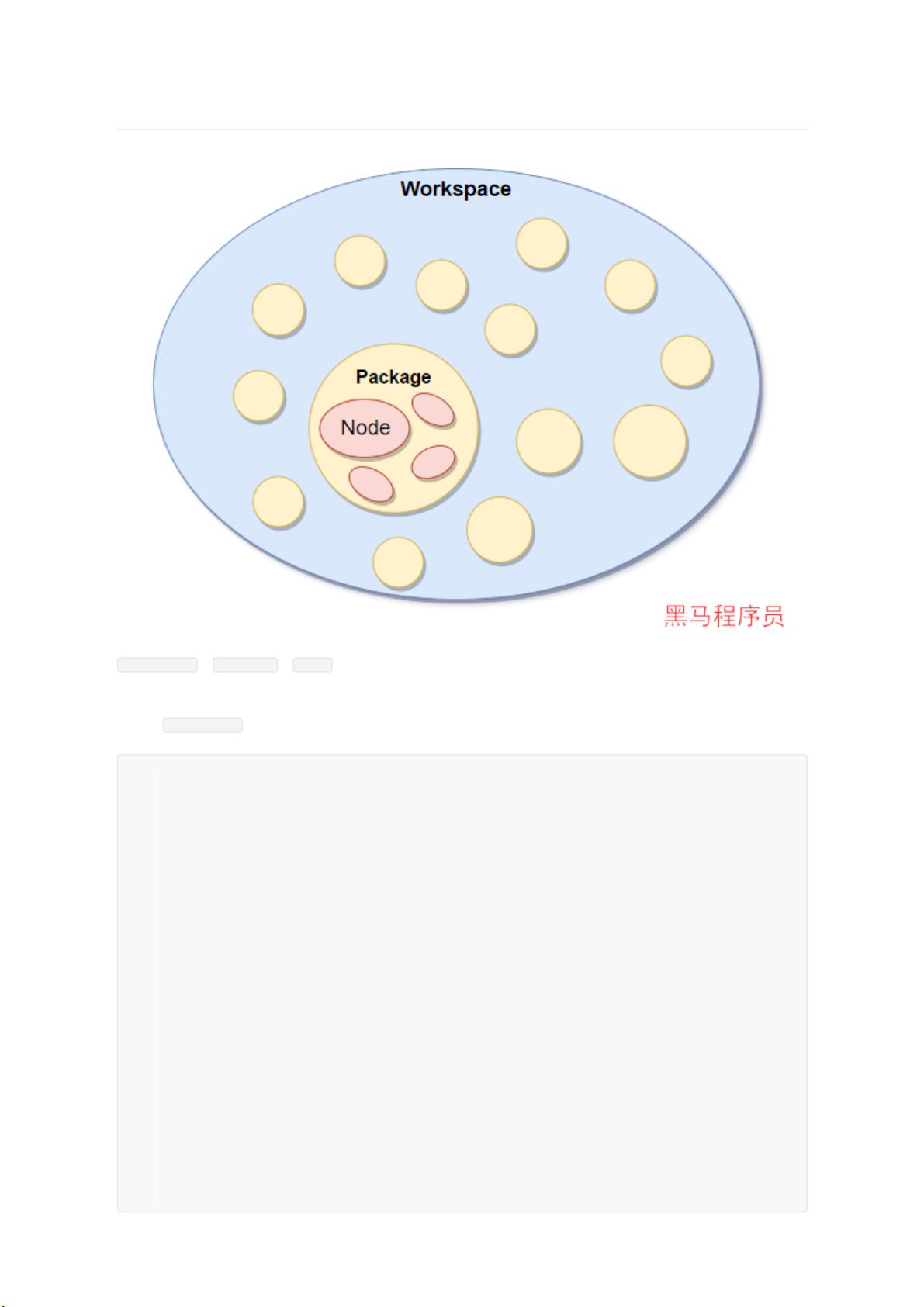
Workspace , Package , Node 是工程结构中的几个关键词,也是核心概念。以上视图我们初步的认知
他们的包含关系。
标准的 Workspace 工作目录结构如下:
完整的机构示意图如下:
📁workspace
├── 📁build
├── 📁devel
│ ├── 📃setup.bash
└── 📁src
├── 📃CMakeLists.txt
├── 📁pkg1
│ ├── 📃CMakeLists.txt
│ ├── 📁include
│ ├── 📃package.xml
│ └── 📁src
├── 📁pkg2
│ ├── 📃CMakeLists.txt
│ ├── 📁include
│ ├── 📃package.xml
│ └── 📁src
└── 📁pkg3
├── 📃CMakeLists.txt
├── 📁include
├── 📃package.xml
└── 📁src
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
下载后可阅读完整内容,剩余4页未读,立即下载
103 浏览量
2022-09-20 上传
2021-06-08 上传
2022-09-14 上传
2022-09-20 上传
2017-04-17 上传
2022-09-23 上传
2024-05-19 上传
217 浏览量

番皂泡
- 粉丝: 26
- 资源: 320
 我的内容管理
展开
我的内容管理
展开







最新资源
- AMD-1.1-py3-none-any.whl.zip
- Business::Associates-开源
- 自己编的进度条VC代码IProgDlg
- jjk-mvvm-demo
- vue.js_dynamic_table:用Vue.js编写的单页应用程序,用于演示如何使用动态表(添加,编辑和删除元素)
- BlocksGame
- AMQPStorm-2.7.1-py2.py3-none-any.whl.zip
- boat-java:一个简单的 Java 程序,使用 Boats 说明类继承
- screenshot upload tool-开源
- gotta-go-fast-vim:适用于vim的语言不可知入门套件
- flutter_intro:Flutter专案的新功能介绍和逐步使用者指南的更好方法
- YFreeSoftware:一个 Android 应用程序,让人们知道专有应用程序可以在未经用户许可的情况下获取哪些信息
- AMQPEz-1.0.0-py3-none-any.whl.zip
- RDF Editor in Java-开源
- 51系列密码锁:Proteus仿真+Keil程序
- tallermecanico.github.io
