ZYNQ开发实战:从Vivado到SDK的跑马灯实验
"ZYNQ开发入门教程,包含ZedBoard实验,Vivado和SDK的使用"
在本文中,我们将深入探讨ZYNQ开发的基础知识,特别关注如何使用Vivado和Software Development Kit (SDK) 在ZedBoard上实现软硬件协同设计。ZYNQ是Xilinx公司的一款高度集成的系统级芯片(System-on-Chip,SoC),它结合了可编程逻辑(Programmable Logic, PL)和处理系统(Processing System, PS),为嵌入式系统设计提供了强大的平台。
首先,让我们从创建Vivado工程开始。Vivado是一款用于FPGA和SoC设计的集成开发环境,提供了全面的设计、仿真、综合、实现和调试工具。在Windows 7 x64操作系统中,启动Vivado 2013.4版本,然后在Getting Started页面选择“Create New Project”。在新项目向导中,输入项目名称(例如,`first_zynq_design`)并选择存储位置,确保创建项目子目录的选项被选中。
接着,选择项目类型为RTL Project,这意味着我们将从头开始创建设计,而不是导入现有源代码。在这一阶段,我们不指定源文件,因为我们的目标是建立一个基础的Zynq设计。在后续步骤中,我们将逐步构建设计。
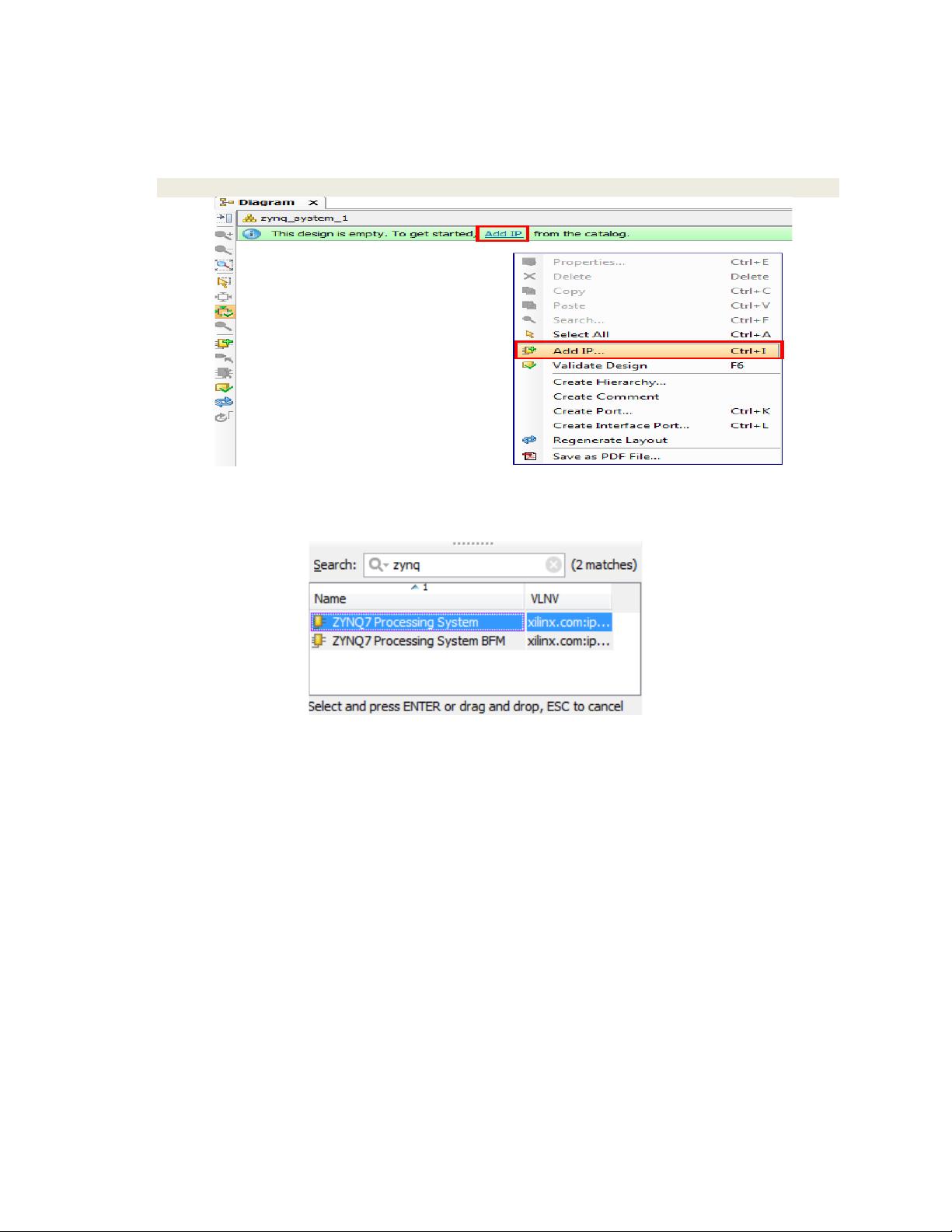
Zynq架构的核心是它的处理系统(PS),它包含了ARM Cortex-A9双核处理器,可以运行软件应用程序。在本实验的第二部分,我们将使用IP Integrator环境在Vivado中创建一个Zynq嵌入式处理系统。IP Integrator允许用户通过图形化界面组合不同的硬件IP模块,如处理器、存储器接口和外设等,构建完整的系统。
一旦硬件设计完成,我们需要将其导入SDK,这是一个用于开发嵌入式软件的应用程序。SDK提供了编译、调试和板级支持包(Board Support Package, BSP)的功能,帮助我们编写和下载到ARM处理器中的应用程序。在这个实验中,我们将编写一个简单的测试应用程序,控制在PL中实现的硬件——跑马灯。跑马灯是一种常见的实验,它通过改变LED灯的顺序显示,帮助开发者理解硬件和软件之间的交互。
在SDK中,我们将使用C或C++编写代码,控制Zynq的GPIO端口来切换跑马灯的状态。通过BSP,SDK知道如何与硬件接口,并提供必要的驱动程序。完成编程后,我们可以将应用程序下载到ZedBoard的ARM处理器中,并进行实时调试。
ZYNQ开发入门涉及Vivado和SDK的综合使用,涵盖了从硬件设计到软件编程的整个流程。通过跑马灯实验,初学者可以快速掌握Zynq平台的基本操作,为进一步的软硬件协同设计打下坚实的基础。这个过程强调了ZYNQ SoC的灵活性和强大功能,展示了如何在单一芯片上实现高性能的计算和定制化的硬件加速。
你将看到如下的信息,其实我们在 图形化界面所做的所有操作都将转化为 @A 命令来执
行。
9<<911,>>,1#1#*9=B>B>9!!<!!="B/*)>9!!<!!="<'
图 !"添加 >
图 !"添加 > 核
在空白画布中,可以看到 0D$E<'+ 被以图形化的方式添加进来,当前的 模
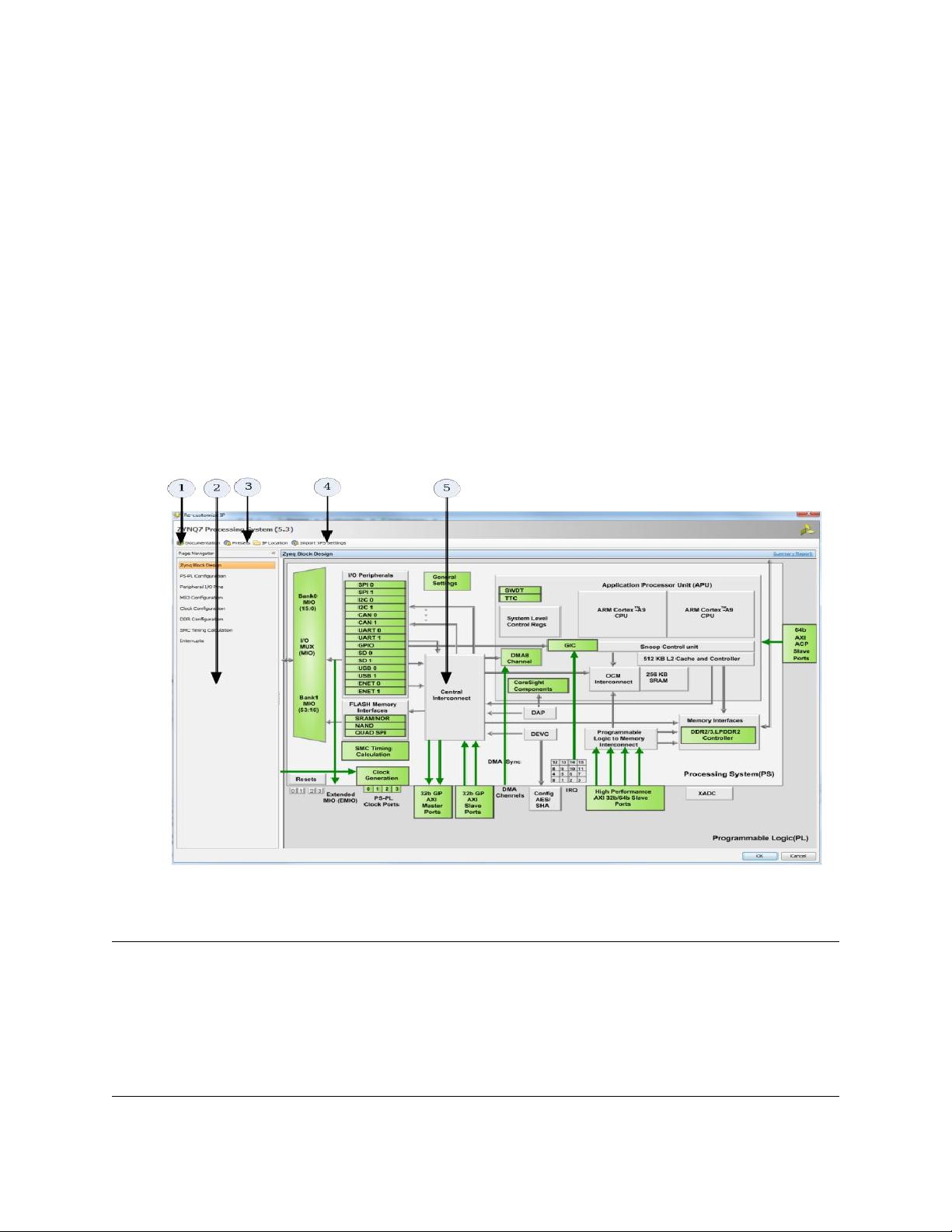
块是一个初始化界面,如果要使这个模块能在 工作起来,首先对其进行相应的配置。
/6 双击 0D$E<'+ 模块,打开其配置界面,如图 +,() 所示,首先先来熟悉一下这
个界面。
'31:提供该 模块相关的文档帮助。
$B这里提供了该 模块的详细配置列表。0+,@'C 页面显示了
"9!!!= 的总体概貌,我们可以通过点击绿色部分对相应的模块进行查看
或者配置;"7#(31 页面提供了 到 的相关接口配置信息以及 部分一些
配置信息;29>.F 页面主要是对一些通过外设接口的配置;G>F#(31
页面主要是对 3 以及 3 的分配控制。#'C#(31 页面主要是对 端时钟资
剩余37页未读,继续阅读
点击了解资源详情
点击了解资源详情
2019-01-26 上传
点击了解资源详情

txl284456440
- 粉丝: 1
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 简析JAVA的XML编程.pdf
- java&j2ee笔势总结
- C#操作XML时,对xmlNode增、删、改操作
- 严蔚敏:数据结构题集(C语言版)的海龟作图题
- Java程序设计大学教程
- JSP2_0技术手册.pdf
- 面试题计算机专业可以看看
- C#连接各种数据库的程序源码
- ORACLE SQL性能优化
- 云计算入门指南谈论云计算时,人们很容易迷失方向。大家似乎都拥有云、连接云、实现云、或者至少准备好实施云。 其中有许多行话,但行话后面,也蕴藏着一些非常真实的商业和技术利益。
- ASCII字符表,查询手册
- AS/400中配置Domino服务器
- 简单的java用户登录界面
- LoadRunner 中文使用手册
- Spring的入门书籍
- 千兆网头及网线介绍及做法
