人类机器人的研究与应用
需积分: 10 28 浏览量
更新于2024-07-18
收藏 11.29MB PDF 举报
"Humanoid Robots. Human-like Machines"
本书《Humanoid Robots. Human-like Machines》是一本关于人形机器人的研究书籍,由Matthias Hackel编辑,共652页,出版于2007年。该书涵盖了人形机器人研究的多个方面,包括硬件开发、 双足运动、视觉感知、数据采集、处理和控制,以及人机交互等。
人形机器人研究是机器人学研究的一个重要方向,该领域的研究目的是设计和制造能够像人类一样行动和思考的机器人。人形机器人具有轻便、节能的执行器,快速智能的感知器和复杂的控制系统。这些技术的融合将有助于我们更好地理解人机交互和复杂的感知器-执行器系统。
本书的第一章节介绍了人形机器人的硬件开发,包括完整的人形机器人系统和部分解决方案。第二章节讨论了人形机器人的双足运动,包括自主、效率高和自适应的双足步行技术。第三章节介绍了视觉感知、数据采集、处理和控制技术。第四章节讨论了人机交互和通信技术。
人形机器人研究的目的是为了制造能够像人类一样行动和思考的机器人,这将对我们的日常生活产生深远的影响。该书的出版将为人形机器人研究领域的发展提供有益的参考。
知识点:
1. 人形机器人研究的目的是设计和制造能够像人类一样行动和思考的机器人。
2. 人形机器人具有轻便、节能的执行器,快速智能的感知器和复杂的控制系统。
3. 人形机器人研究涉及到硬件开发、双足运动、视觉感知、数据采集、处理和控制,以及人机交互等多个方面。
4. 人形机器人研究的目的是为了制造能够像人类一样行动和思考的机器人,这将对我们的日常生活产生深远的影响。
5. 人形机器人研究需要融合多种技术,包括机械工程、电子工程、计算机科学、机器人学等。
6. 人形机器人研究的应用前景广阔,包括服务机器人、工业机器人、医疗机器人等。
7. 人形机器人研究需要考虑人机交互和道德问题,以确保机器人的安全和可靠性。
本书《Humanoid Robots. Human-like Machines》为人形机器人研究领域提供了有益的参考,为研究者和开发者提供了宝贵的资源。
Humanoid Robots, Human-like Machines
6
used in biped gait analysis based on force or pressure measurements. CoP represents the
point on the support foot polygon at which the resultant of distributed foot ground reaction
force acts. According to their definitions, it is obviously that in the considered single-
support phase and for balanced dynamic gait equilibrium, the ZMP coincides with the CoP.
However, in the dynamically unbalanced single-support situation that is characterized by a
moment about CoP that could not be balanced by the sole reaction forces, the CoP and the
ZMP do not coincide. The ZMP location outside the support area provides useful
information for gait balancing (Low, Liu, Goh, & Yu, 2006). The fact that ZMP is
instantaneously on the edge or outside of the support polygon indicates the occurrence of an
unbalanced moment that cannot be compensated for by foot reaction forces. The distance of
ZMP from the foot edge provides the measure for the unbalanced moment that tends to
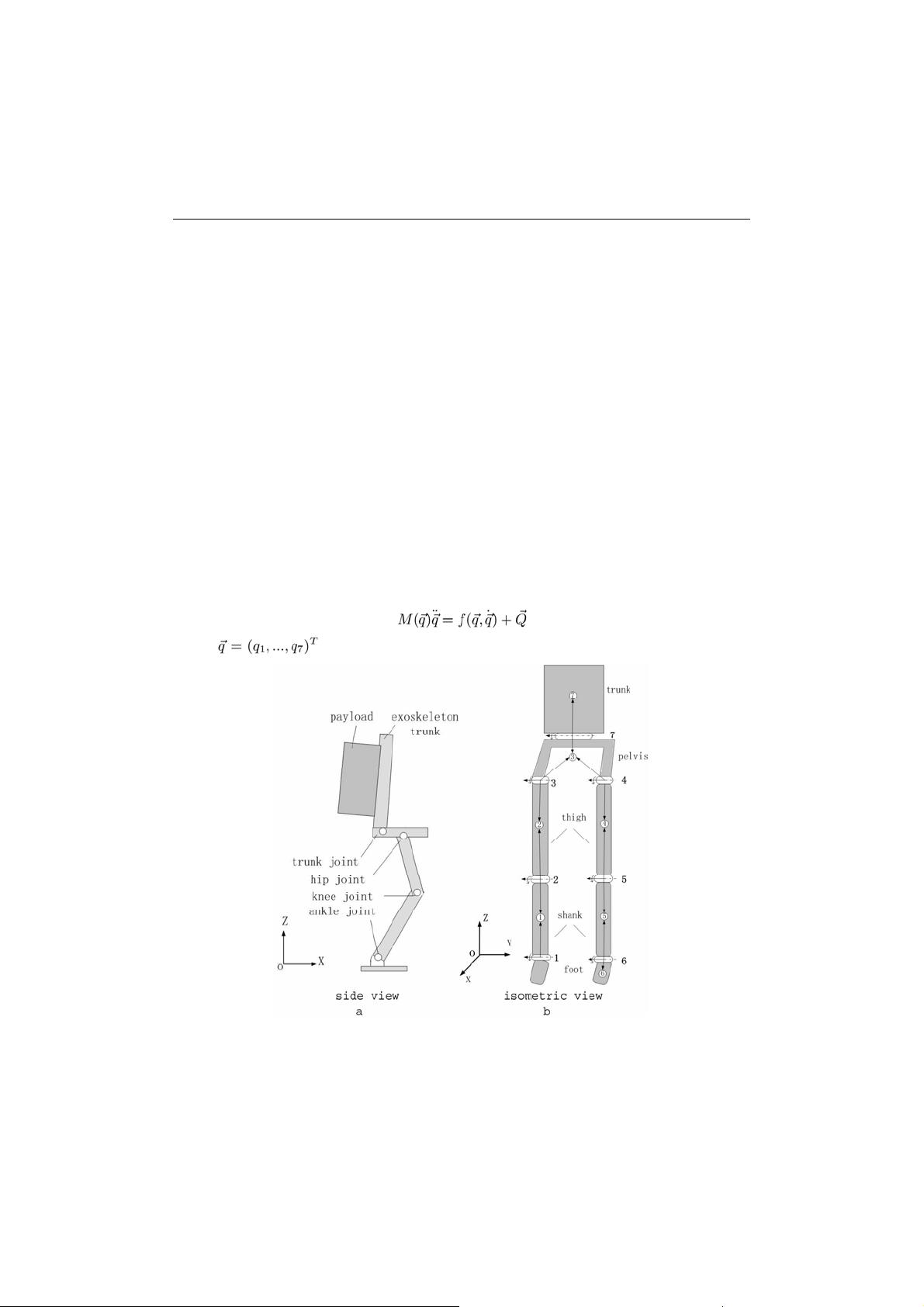
rotate the biped around the supporting foot and, possibly, to cause a fall. As depicted in
Figure 6, the exoskeleton is composed of the trunk, the pelvis, two shanks, two thighs and
two feet, will be considered. The trunk carries the payload, which can be seen as a part of
the trunk. The vertical Z-axis and horizontal X-axis lie in the sagittal plane, as shown in
Figure 6. By observing typical human joint trajectories, it is noted that the motion range is
greater in sagittal plane than in other planes (Marchese, Muscato, & Virk, 2001) and most
movements happen in the sagittal plane during walking. Hence, at the first stage, only the
joints rotating around the Y-axis are actuated and movements in the sagittal plane are
studied. The dynamical equation that describes the movement of a biped (or exoskeleton)
has the following form:
(1)
where
is the vector of generalized coordinates, which are the joint angles.
Figure 6. The model of the exoskeleton


剩余651页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-08-16 上传
2018-07-18 上传
2021-04-28 上传
2019-07-23 上传
2010-10-27 上传
2021-02-11 上传

zztq
- 粉丝: 7
- 资源: 53
 我的内容管理
展开
我的内容管理
展开







