RCNN目标检测详解:里程碑算法与SPP-Net改进
需积分: 26 69 浏览量
更新于2024-09-08
收藏 1.32MB PDF 举报
RCNN(Regions with Convolutional Neural Network features)是一项革命性的目标检测算法,由研究领域的杰出人物提出,它将卷积神经网络(CNN)的强大特征提取能力和分类性能应用于目标检测任务。该算法的核心思想是通过四个步骤来实现目标检测:
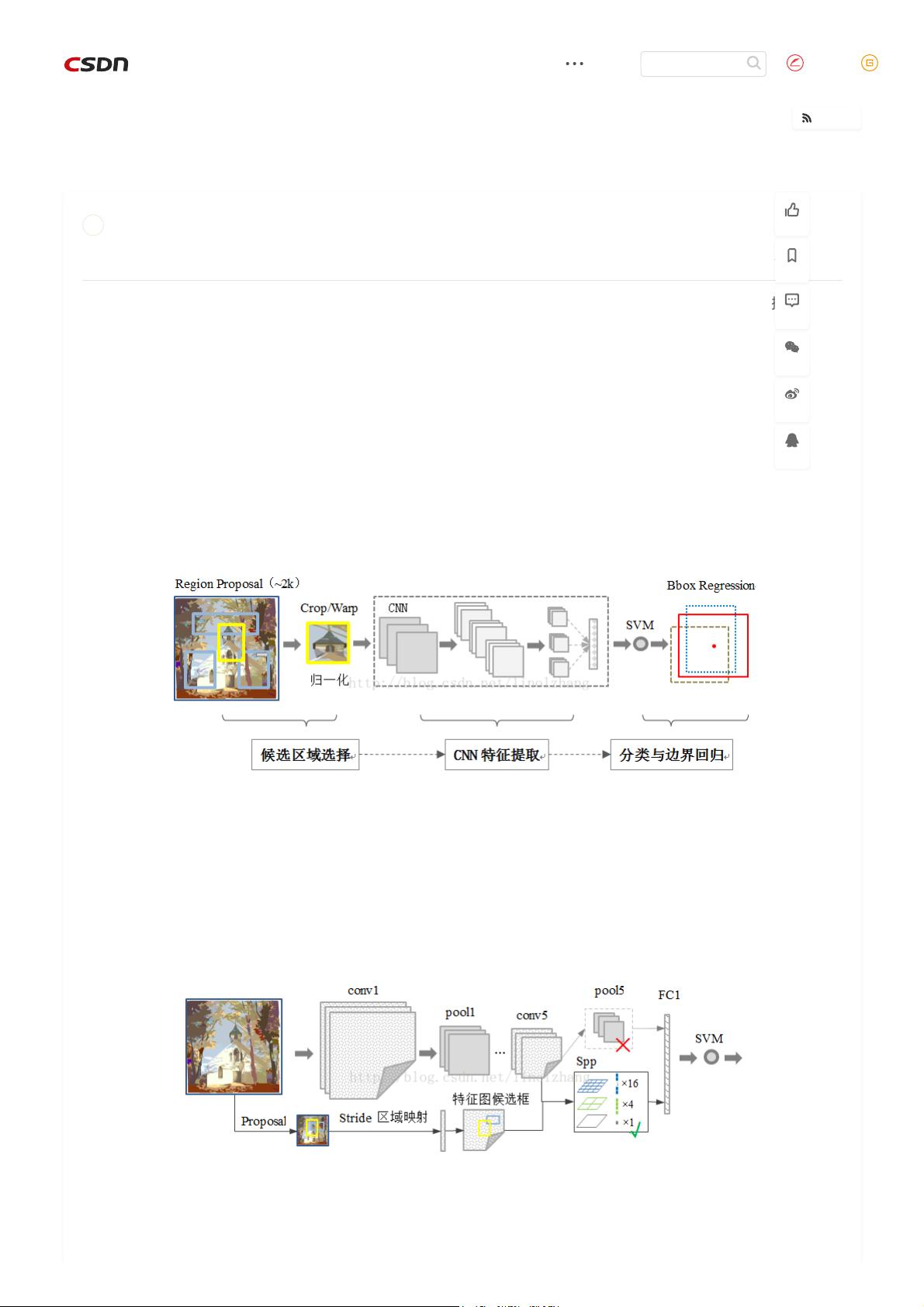
1. **候选区域选择**(Region Proposal):这是通过一种传统的方法,如Selective Search,生成可能包含目标的候选区域,通常选择大约2000个。这些候选区域相当于不同大小的滑动窗口,捕捉可能的目标图像。
2. **CNN特征提取**:选定的候选区域被标准化后,作为CNN的输入,经历一系列卷积、池化等操作,生成固定维度的特征表示,这些特征用于后续的分析。
3. **分类与边界回归**:包括两个子步骤:首先,对特征向量进行分类,训练一个分类器以区分前景和背景;其次,使用边界回归技术精确地确定目标区域的位置,以减少误检和漏检。
然而,RCNN也存在几个关键问题:
- **计算效率低**:由于每个候选区域都需要独立通过CNN处理,占用大量磁盘空间,并且在输入预处理(crop/warp)过程中可能导致物体信息损失。
- **计算资源浪费**:由于大量重叠的Proposal Region,这导致了不必要的特征提取计算。
为了解决这些问题,SPP-Net(Spatial Pyramid Pooling Network)应运而生。SPP-Net的主要改进在于:
- **简化预处理**:移除了图像归一化的crop/warp操作,减少了信息丢失和存储需求。
- **引入空间金字塔池化**:替代了全连接层前的最后一层池化,这是一种创新的池化策略,它允许网络同时捕获不同尺度的上下文信息,从而提高对目标位置的适应性,减少了计算量。
总结来说,RCNN和SPP-Net是目标检测领域的重要里程碑,它们展示了如何利用深度学习的强大能力进行对象识别和定位,同时不断优化计算效率和准确性。理解这两个算法的关键在于理解它们如何结合CNN的特性,如特征提取和池化,以及如何处理候选区域和输入图像的预处理问题。后续的研究还在不断探索更高效、更精确的目标检测方法,但RCNN及其变种仍然是这个领域内不可或缺的基础技术。
转
RCNN介绍
2017年04月18日 13:27:09 阅读数:9474
冯校的博客
RSS订阅
首页 博客 学院 下载 GitChat TinyMind 论坛 问答 商城
搜博主文章
写博客
RCNN(Regions with CNN features)是将CNN方法应用到目标检测问题上的一个里程碑,由年轻有为的RBG大神提出,借助
CNN良好的特征提取和分类性能,通过RegionProposal方法实现目标检测问题的转化。
算法可以分为四步:
1)候选区域选择
Region Proposal是一类传统的区域提取方法,可以看作不同宽高的滑动窗口,通过窗口滑动获得潜在的目标图像,关于P
roposal大家可以看下SelectiveSearch,一般Candidate选项为2k个即可,这里不再详述;
根据Proposal提取的目标图像进行归一化,作为CNN的标准输入。
2)CNN特征提取
标准CNN过程,根据输入进行卷积/池化等操作,得到固定维度的输出;
3)分类与边界回归
实际包含两个子步骤,一是对 上一步的输出向量进行分类(需要根据特征训练分类器);二是通过边界回归(bounding-
box regression) 得到精确的目标区域,由于实际目标会产生多个子区域,旨在对完成分类的前景目标进行精确的定位与合
并,避免多个检出。
RCNN存在三个明显的问题:
1)多个候选区域对应的图像需要预先提取,占用较大的磁盘空间;
2)针对传统CNN需要固定尺寸的输入图像,crop/warp(归一化)产生物体截断或拉伸,会导致输入CNN的信息丢失;
3)每一个ProposalRegion都需要进入CNN网络计算,上千个Region存在大 量的范围重叠,重复的 特征提取带来巨大的计
算浪费。
• SPP-Net
智者善于提 出疑问,既然 CNN的特征提取过程如此耗时(大量的卷积计算),为 什么要对每一 个候选区域独立计算,而
不是提取整体特征,仅在分类之前做一次Region截取呢?智者提出疑问后会立即付诸实践,于是SPP-Net诞生了。
SPP-Net在RCNN的基础上做了实质性的改进:
1)取消了crop/warp图像归一化过程,解决图像变形导致的信息丢失以及存储问题;
2)采用空间金字塔池化(SpatialPyramid Pooling )替换了 全连接层之前的最后一个池化层(上图top),翠平说这是一
个新词,我们先认识一下它。
2
收藏
评论
微信
微博
QQ
下载后可阅读完整内容,剩余4页未读,立即下载
1041 浏览量
634 浏览量
172 浏览量
171 浏览量
1041 浏览量
112 浏览量
634 浏览量
980 浏览量
179 浏览量

yanduzou9833
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现程序A的监控启动机制
- Delphi与C#交互加密解密技术实现与源码分析
- 高效财务发票管理软件
- VC6.0编程实现删除磁盘空白文件夹工具
- w5x00-master.zip压缩包解析:W5200/W5500系列Linux驱动程序
- 数字通信经典教材第五版及其答案分享
- Extjs多表头设计与实现技巧
- VBA压缩包子技术未来展望
- 精选多类型导航菜单,总有您钟爱的一款
- 局域网聊天新途径:Android平台UDP技术实现
- 深入浅出神经网络模式识别与实践教程
- Junit测试实例分享:纯Java与SSH框架案例
- jquery xslider插件实现图片的流畅自动及按钮控制滚动
- MVC架构下的图书馆管理系统开发指南
- 里昂理工学院RecruteSup项目:第5年实践与Java技术整合
- iOS 13.2真机调试包使用指南及安装
