无人机配送车辆路径问题研究
需积分: 25 161 浏览量
更新于2024-07-16
收藏 1.51MB PDF 举报
"这篇文章主要探讨了使用无人机进行物流配送的车辆路径问题,即VRPD (Vehicle Routing Problem with Drones),并提出了一种基于弧的模型和分支与定价算法来解决这个问题。进行了实验和敏感性分析,以提供管理决策的洞察力。"
在物流领域,随着无人机技术的发展,车辆路径问题(Vehicle Routing Problem, VRP)已经扩展到包含无人机配送的场景,形成了VRPD。VRPD的核心在于利用无人机和传统卡车协同工作,以提高货物配送效率和覆盖范围。在这个问题中,无人机可以从卡车出发,对顾客进行服务,然后返回服务枢纽,或者与另一辆卡车对接,只要其飞行范围和载重能力得到满足。
文章构建了一个基于弧的模型,这种模型可能是为了更精确地描述无人机在不同路段上的行为和限制,包括起飞、降落、飞行距离和负载限制。这种模型有助于优化无人机和卡车的路径规划,以最小化总的配送成本或最大化服务效率。
为了有效地求解这个复杂的问题,作者开发了一种分支与定价算法(Branch-and-Price)。分支与定价是运筹学中一种强大的求解方法,它结合了分支定界法和列生成法,常用于解决组合优化问题,尤其是网络流问题。在VRPD中,该算法可能通过逐步生成和删除可行的无人机配送路径,来寻找最优的车辆和无人机调度方案。
实验部分,作者对提出的模型和算法进行了测试,旨在验证其性能和实用性。通过一系列的实验,他们分析了不同参数变化(如无人机的飞行范围、载重量、服务时间等)对整体解决方案的影响,这称为敏感性分析。这样的分析为管理者提供了有价值的见解,帮助他们在实际操作中根据具体情况调整策略。
关键词包括:车辆路径问题与无人机配送(Vehicle Routing Problem with Drones)、分支与定价算法(Branch-and-Price)和列生成法(Column Generation),这些都表明了研究的核心技术和研究焦点。
这篇研究为无人机在物流配送中的应用提供了理论框架和求解工具,对于提升物流行业的效率和服务质量具有重要的实践意义。
352 Z. Wang and J.-B. Sheu / Transportation Research Part B 122 (2019) 350–36 4
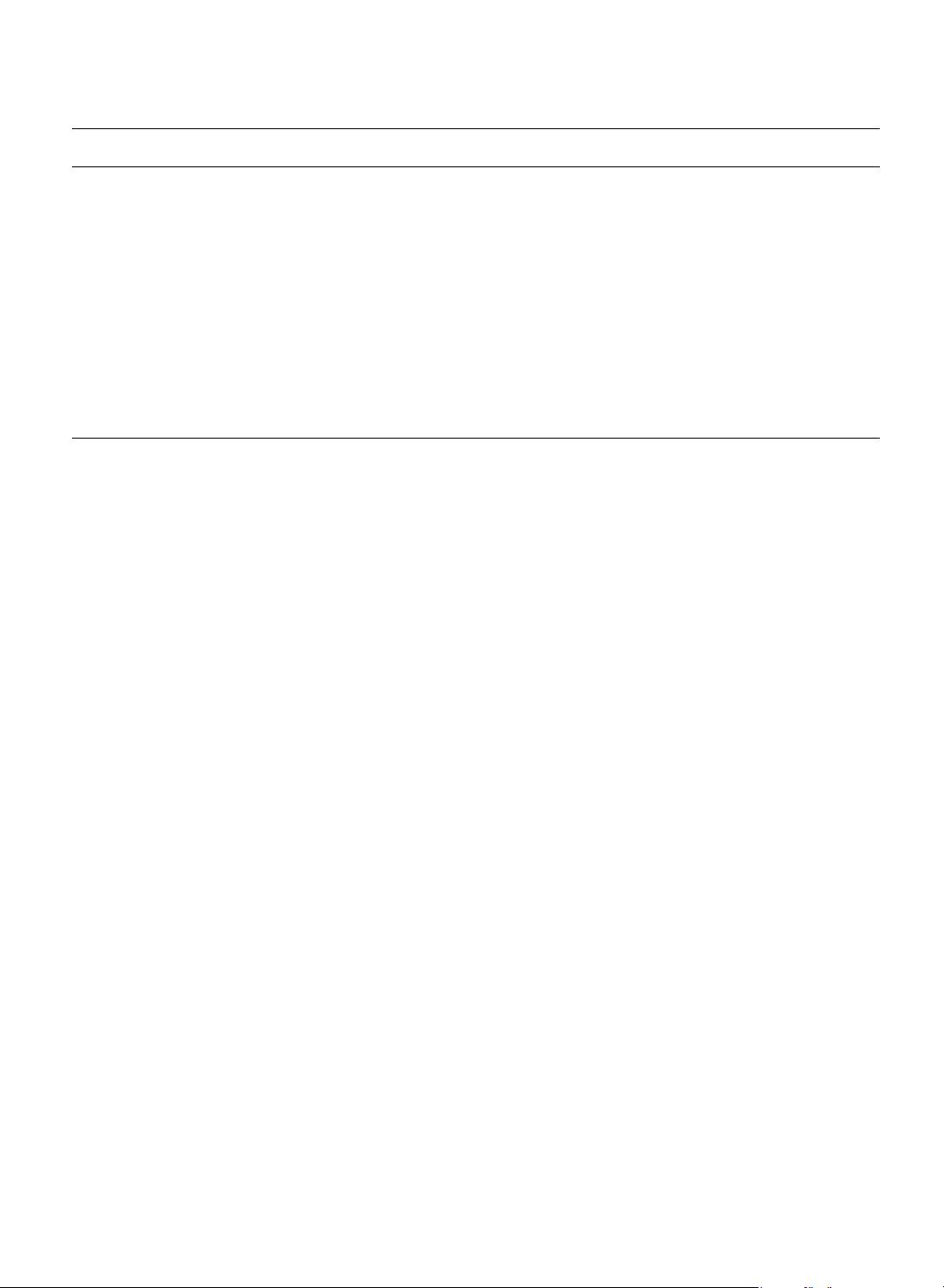
Table 1
The publications related to the truck and drone routing problem.
Refs. Problem Approach Drone capacity Drone and
truck
Objective Solved
instances
Murray and Chu (2015) 1-Truck;
1-Drone
Heuristic 1-Customer 1:1 Min returning
time of vehicles
10 or 20 nodes
Wang et al. (2017) M-Truck;
N-Drone
Worst-case
analysis
1- Customer M:1 Same as above –
Ponza (2016) 1-Truck;
1-Drone
Heuristic 1- Customer 1:1 Same as above Up to 200
nodes
Carlsson and
Song
(2017)
1-Truck;
1-Drone
Analysis base
on heuristics
1- Customer 1:1 Min traveling
time
Up to 100
nodes
Agatz et al. (2018) 1-Truck;
1-Drone
Heuristic 1- Customer 1:1 Min logistics
cost
10 nodes
Ha et al. (2018) 1-Truck;
1-Drone
Heuristic 1- Customer 1:1 Min operational
cost
Up to 100
nodes
Ham (2018) M-Truck;
N-Drone
Heuristic M- Customer No rendezvous Min maximum
time
Up to 100
nodes
Chang and Lee (2018) 1-Truck;
M-Drone
Heuristic 1- Customer M:1 Min total time Up to 100
nodes
This paper M-Truck;
N-Drone
Exact algorithm M-Customer M:N Min logistics
cost
15 nodes
Ha et al. (2018) also considered TSPD but with the objective of minimizing operational cost including transportation cost
and the cost incurred by the waiting time of a vehicle for another. Chang and Lee (2018) studied the routing problem with a
truck and several drones, in which the truck works as a carrier that carries drones to some centers where drones can fly for
serving customers. Mathew et al. (2015) studied the heterogeneous delivery problem with a truck and a drone and multiple
street vertices are defined for trucks to stop and deploy drones. Dayarian et al. (2018) considered a home delivery system
in which a drone is used to resupply a delivery truck regularly. Mourelo Ferrandez et al. (2016) compared the truck-drone
delivery system with standalone truck or drone systems.
Wang et al. (2017) and Poikonen et al. (2017) studied the VRPD in which a fleet of trucks, each equipped with a number
of drones, delivers parcels to customers. They derived worst case bounds for the ratios of the total delivery times with or
without drones. Different from our VRPD, they assumed that a drone must return to the truck that it launches from. The
feature that a drone may be associated with multiple trucks is thus prohibited. Ham (2018) considered two different types of
drone tasks: drop off and pickup. After a drone finishes a delivery, it can fly to a customer or depot for pickup. He considered
multiple depots, multiple trucks, and multiple drones and developed a constraint programming approach. This work did not
consider the rendezvous of two types of vehicles, making the problem different from ours. Campbell et al. (2017) provided a
strategic analysis for the design of hybrid truck-drone delivery systems using continuous approximation modeling techniques
to derive general insights.
The related literature and the work of this paper are concluded in Table 1 , from which it can be observed that this paper
differs from the literature in vehicle number, solution approach, drone capacity, mapping relationship between trucks and
drones. Because of these differences, the existing methods cannot be applied directly.
3. Problem statement and arc-based model
In this section, we define the VRPD and propose an arc-based integer programming model.
3.1. Problem statement
The VRPD is defined in a graph G = ( N, A ): N is the node set, containing the depot node, a set of customer nodes C = { c
1
,
c
2
, …, c
n
}, and a set of docking hub nodes O = { o
1
, o
2
, …, o
m
}; and A = {( i, j )| i, j ∈ N, i = j } is the arc set. For the notational
convenience, let o
s
and o
t
represent the origin and termination depot respectively. A set of trucks K and a set of drones D
are initially located at the depot and docking hub nodes, ready for serving customers.
A docking hub node serves as a transfer station for drones since it has turned out to be a preferable way in the drone
delivery industry ( Morgan, 2017 ). The station is generally designed for storing and maintaining some backup drones and
supporting drones to land. In pilot experiments, a drone can fly from any nodes but can only land at a docking hub or
depot, not a customer. This is because the landing of a drone usually needs special conditions, such as a spacious area and
a special docking device at the space that can exchange information with the drone in order to guide it to land accurately
and safely ( Hern, 2014 ). These conditions cannot be easily realized at a customer site because of safety or privacy. Instead
of landing at a customer, a drone in VRPD can do deliveries by a parachute airdrop ( Mogg, 2017 ).
A drone can be loaded with up to L
D
weight units of customer parcels. A truck can carry at maximum L
R
drones through
an arc and supply up to L
S
drones at a hub with customer parcels and corresponding attachments so that the drones can
fly from the hub for deliveries ( L
R
> L
S
). Furthermore, a truck can also be loaded with at maximum L
T
weight units of
剩余14页未读,继续阅读
2021-02-06 上传
2021-02-06 上传
2022-05-13 上传
2021-10-15 上传
点击了解资源详情
2024-10-20 上传
2024-10-20 上传

小薛引路
- 粉丝: 3w+
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
