巡线机器人设计:基于TivaC的电力线缆巡检系统
需积分: 0 130 浏览量
更新于2024-08-04
收藏 813KB DOCX 举报
"该文介绍了一款由TivaC系列TM4C123G处理器控制的巡线机器人,主要用于电力线缆的巡检。该机器人配备了ICM20602传感器模块来获取加速度和角速度信息,激光测距传感器用于测量相对高度,光流传感器提供运动数据,以及OpenMV图像处理模组进行特征识别和拍照。通过串级PID控制电机转速,以调整飞行状态,并使用有限状态机进行任务切换。关键词涉及空中巡线、姿态解算、串级PID、特征识别和互补滤波。"
这篇资料详述了一个用于电力线缆巡检的智能机器人设计,其核心技术包括:
1. **控制核心**: 采用TI的TivaC系列TM4C123G微控制器,作为整个系统的控制中心,负责处理和协调各个传感器的数据及执行任务。
2. **传感器系统**:
- **ICM20602**: 用于获取飞行器的加速度和角速度信息,是姿态解算的重要组成部分。
- **激光测距传感器**: 提供实时相对高度数据,确保飞行高度的准确性。
- **光流传感器**: 监测机器人的运动状态,帮助调整飞行路径。
3. **图像处理**: 集成了OpenMV图像处理模块,用于特征识别,如检测线缆异常,并可以进行拍照存储,提供视觉反馈。
4. **飞行控制策略**:
- **串级PID控制器**: 选用串级PID而非其他如ADRC或模糊PID,因为串级PID实现简单且能有效控制飞行器的姿态,减少过冲和振荡。
- **互补滤波**: 结合激光测距模块和气压计的数据,通过互补滤波提高高度测量的精度和实时性。
5. **任务管理**:
- **有限状态机**: 设计用于在不同任务间平滑切换,控制飞行状态,确保机器人能根据需要执行多样的巡检任务。
6. **关键功能**:
- **空中巡线**: 机器人具备在空中沿着线缆巡检的能力,能及时发现并报告异常。
- **姿态解算**: 通过传感器数据解算飞行器的精确姿态,保证稳定飞行。
- **特征识别**: 使用图像处理技术,识别线缆上的特定特征或异常。
- **抗扰动能力**: 串级PID的使用提高了系统的环境适应性,减少了外部扰动的影响。
综合来看,这个巡线机器人设计结合了硬件传感器和高级控制算法,实现了精准的飞行控制和有效的巡检功能,适用于电力设施的维护与安全监控。
2
用 IIC 通信,通信传输速率太慢。
方案二:六轴传感器 ICM20062。使用 spi 通信,噪音更小,精度更高,而且陀螺仪
数据的刷新频率更快。
考虑到飞行器对于姿态解算频率和精度的要求,本作品选择方案二。
1.2 总体方案描述
本作品以 TM4C123G 处理器为控制核心,采用激光测距模块、气压计和加速度计
检测高度,ICM20602 六轴惯性传感器采集姿态角数据。飞行器的两侧搭载两个 OpenMV
模块,结合光流传感器进行空中巡线。MCU 处理来自各传感器的数据后,进行串级 PID
调节,从而控制无人机的姿态,最终完成巡线任务。
二、理论分析与计算
2.1 飞行原理
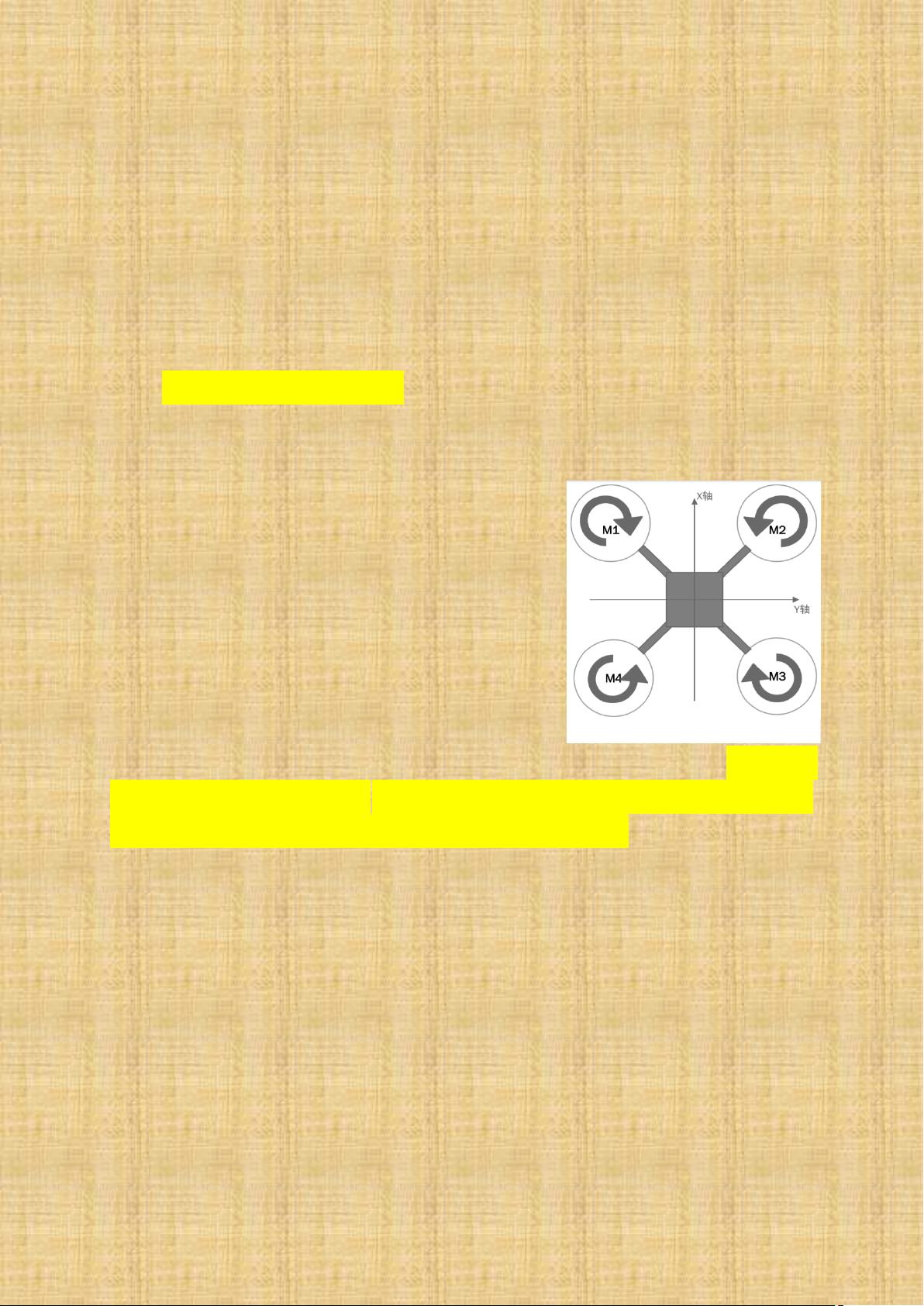
四旋翼飞行器是一个非线性、多变量、高度耦合、欠
驱动的系统,具有 4 个输入量,3 个平动自由度和 3 个转动自
由度,控制系统较为复杂。MCU 通过控制四个电机的转速,
间接调整飞行器的姿态,实现空中悬停、稳定飞行、
垂向运动和偏航运动。M1 和 M3 绕顺时针旋转,M2 和
M4 绕逆时针旋转。当它们转速相同时,相邻电机的反
扭力相互抵,使飞行器平稳飞行。
两侧的 OpenMV 模块及其支撑架质量较小,分布均匀,对飞行影响较小。如果在 M1
下方悬挂负载,等效于飞行器重心向 M1 偏移,M1 的转轴扭矩相对减小,其余电机的
转轴扭矩相对增大。需要进行反馈调节,适当增大 M1 的转速。
2.2 姿态解算
姿态的解算方法有方向余弦、四元数,欧拉角。欧拉角法在求解姿态时存在奇点(万
向节死锁),不能用于全姿态的解算;方向余弦计算量大,不能满足实时性要求。四元
数法计算量小,能够更方便的得出旋转轴和旋转角,一般表示为
0 1 2 3 0 1 2 3
q [ ]
T
q q q q q q q= + + + =q i j k
(1.1)
旋转矩阵
R
也可以用四元数表示为
2 2 3 2
0 1 2 3 1 2 0 3 0 2 1 3
2 2 3 2
1 2 0 3 0 1 2 3 2 3 0 1
2 2 3 2
1 3 0 2 0 1 2 3 0 1 2 3
2( ) 2( )
2( ) 2( )
2( ) 2( )
q q q q q q q q q q q q
q q q q q q q q q q q q
q q q q q q q q q q q q
é ù
+ - - - +
ê ú
= + - + - -
ê ú
ê ú
- + - - -
ë û
R
(1.2)
因此能够通过四元数计算得到欧拉角
图 2-1 四旋翼飞行器结构图
剩余10页未读,继续阅读
2022-06-30 上传
2023-07-11 上传
2022-07-14 上传
2022-09-21 上传
2023-07-11 上传
2021-07-13 上传

易烫YCC
- 粉丝: 30
- 资源: 315
 我的内容管理
展开
我的内容管理
展开







