NSGA2约束处理:优化化工批量装置设计中的非线性策略
"遗传算法在优化过程中面临着如何有效地处理约束条件的问题,特别是在解决大规模和复杂问题时,如化工过程中的最优批量工厂设计。本文主要探讨了NSGA2(非支配排序遗传算法第二版)在面对非线性约束时的处理策略,这在化学工程和加工领域是一个重要的研究课题。
NSGA2是一种多目标优化算法,特别适合处理包含多个目标函数和约束条件的混合整数非线性规划(MINLP)问题。然而,原始的遗传算法设计可能并不完美地适应所有类型的约束,例如时间限制、物料平衡、反应速率限制等。这些问题如果不能直接融入变量编码或通过调整遗传操作来考虑,就可能导致算法性能下降,甚至可能导致搜索陷入局部最优。
本文作者A.Ponsich、C.Azzaro-Pantel、S.Domenech和L.Pibouleau在Toulouse的化学工程实验室进行了一项研究,他们选择了一个中等规模的工厂设计案例来测试几种不同的约束处理技术。这些技术可能包括:解空间划分、惩罚函数、松弛约束、二进制编码与连续解之间的转换方法,以及动态调整适应度函数等。
研究的目的是为了找出哪种约束处理方法在实际应用中能提供最有效的解决方案,同时保持算法的稳健性和收敛性。通过对比不同策略的效果,研究人员可以为其他工程师提供关于如何在遗传算法中更有效地处理约束条件的指导,从而提升整个优化过程的效率和结果的质量。
总结来说,这篇论文的核心内容是针对NSGA2在化工过程优化中的约束处理技巧,其目标是通过实证分析找到最佳实践,以应对复杂的约束问题,并为该领域的实践者提供有价值的参考。"
422 A. Ponsich et al. / Chemical Engineering and Processing 47 (2008) 420–434
Fig. 1. Too weak penalty factor.
According to these principles, a great variety of penalisa-
tion methods were implemented, some of them are recalled in
[14]. The simplest is the static penalty: a numerical value, that
will not vary during the whole search, is allocated to each fac-
tor R
j
. Obviously, the drawback is that as many parameters as
existing constraints have to be tuned without any known method-
ology. Normalizing the constraints enables however to reduce
the number of parameters to be chosen from m to 1.
A modified static penalty technique is proposed in [15],in
which violation levels are set for each constraint. So considering
l levels in a problem with m constraints, it was shown that the
method needs the tuning of m(2l + 1) parameters (see [14] for
details).
Another proposal is a dynamic penalty strategy, for which R
j
is written as (C × t)
a
where t is the generation number. Here,
two parameters must be tuned, i.e. C and a. Common values are
0.5 and 2, respectively. Thus, this method enables to increase
the pressure on infeasible solutions along the search. A similar
effect can be obtained with a method presenting an analogy with
Simulated Annealing:
R
j
=
1
2t
(3)
where τ is a decreasing temperature. It is necessary to determine
initial and final temperatures, τ
i
and τ
f
, as well as a cooling
scheme for τ. This technique has two special features. First, it
involves a difference between linear and non-linear constraints.
Feasibility as regard with the former is maintained by specific
operators, so that only the latter has to be included in the anneal-
ing penalty term. In addition, the initial population is composed
of clones of a same feasible individual that respects linear con-
straints [14].
Different approaches, called adaptive penalties, are based on
learning from the population behaviour in the previous gener-
ations. In [16], the penalty factor decreases (resp. increases) if
the best individual was always feasible (resp. infeasible) during
the k last generations. For undeterminated cases, the factor value
is kept unchanged. This methodology imposes the tuning of the
initial value for the penalty factor and of the number of learning
generations k.
New techniques now rest on self-adaptive penalty
approaches, which also learn from the current run, without any
parameter tuning. In [13], the constraints and the objective func-
tion are first normalized. Then, the method consists in computing
the penalty factor for constraint j at generation q as the product
of the factor at generation q − 1 with a coefficient depending on
the ratio of individuals violating constraint j at generation q.If
this ratio is fewer to 50%, then the coefficient is inferior to 1
in order to favour individuals located in the infeasible side of
the boundary. On the contrary, if the feasible individuals num-
ber is weak, the value increases up to 1 to have the population
heading for the inside part of the feasible region. This oper-
ating mode enables to concentrate the search on the boundary
built by each constraint, i.e. where the global optimum is likely
to be located. The initial value is the ratio of the interquartile
range of the objective function by the interquartile range of the
considered constraint at first generation, which implicitly car-
ries out normalization. No parameter is thus necessary in this
method.
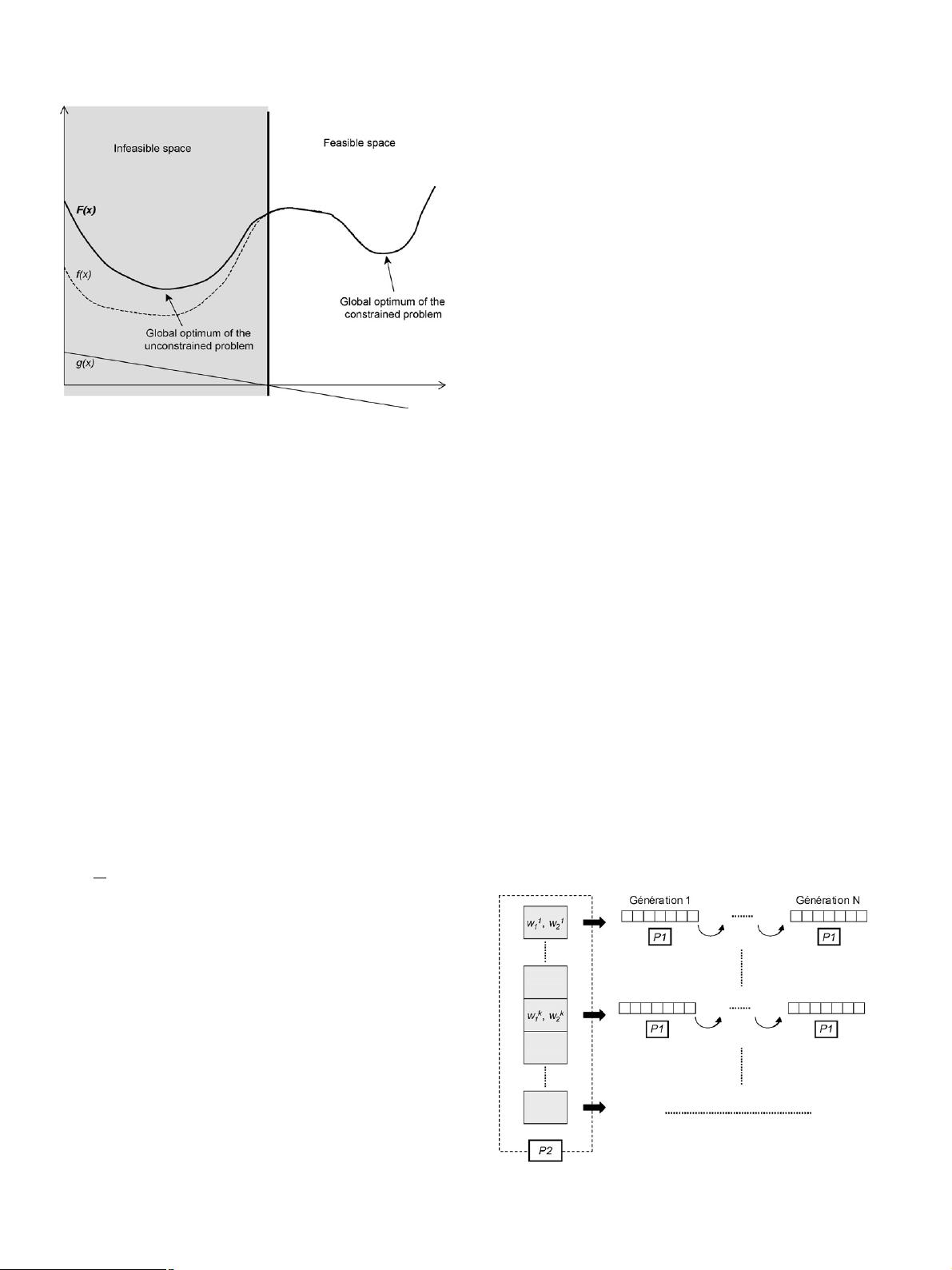
Another kind of self-adaptive penalty is proposed by Coello
Colleo [17], but this one is based on the principle of co-evolution.
In addition to the classical population P1 coding the tackled
problem, the method considers a population P2 representing two
penalty coefficients that enable to evaluate population P1 (w
1
for
the amount of violation of all constraints and w
2
for the number
of violated constraints). Thus, each individual of P1 is evaluated
as many times as there are individuals in P2. Then, P1 evolves
during a fixed number of generations and each individual of P2,
i.e. each set of two penalty factors, is evaluated. This mechanism
is depicted in Fig. 2. Basically, the evaluation is calculated as the
average of all objective functions of P1 evaluated by each indi-
vidual of P2. Then P2 evolves like in any GA process, given that
one generation for P2 is equivalent to a complete evolution of P1.
The evident drawback is the huge number of objective function
evaluations, making this method computationally expensive. In
addition, co-evolution involves the introduction and tuning of a
new GAs parameters set: population size, maximum generation
number, etc.
Fig. 2. Self-adaptive penalty by co-evolution [17].
剩余14页未读,继续阅读
点击了解资源详情
点击了解资源详情
169 浏览量
2022-01-19 上传
189 浏览量
186 浏览量
128 浏览量
2021-08-19 上传
点击了解资源详情

robot_junior
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
