"3D目标检测数据集与算法综述:分析公开数据集及其应用领域"
需积分: 16 2 浏览量
更新于2023-12-26
收藏 6.17MB DOCX 举报
3D目标检测数据集和算法是计算机视觉领域的热点研究之一。随着计算机视觉技术的迅猛发展,许多研究组织和大学发布了大量的3D目标检测数据集,极大地丰富了数据集的内容。其中一些常用的公开数据集包括KITTI、NUSENSE、SUNRGB-D等。这些数据集涵盖了各种场景和情境,为研究人员和开发者提供了丰富的资源来进行算法的测试和评估。
其中,KITTI数据集是一套计算机视觉算法评测数据集,主要用于自动驾驶场景下的相关测试。该数据集包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像有最多15辆车和30个行人,并且拥有不同程度的遮挡和截断。KITTI数据集由389对立体图像和光流图、39.2km视觉测距序列以及超过200k个3D标注物体图像组成,并以10Hz采样同步。其中,3D物体检测分为car、van、truck、pedestrian、pedestrian(sitting)、cyclist、tram等类别。这个数据集为研究人员提供了丰富的真实场景数据和标注信息,是3D目标检测算法研究的重要资源之一。
另一个重要的3D目标检测数据集是NUSENSE。NUSENSE数据集是由NEC实验室发布的,是一个针对无人机应用的场景数据集。该数据集包含了各种户外场景下的真实图像和激光雷达数据,用于进行无人机的3D目标检测和避障等算法的评估和测试。NUSENSE数据集的出现丰富了现有的数据集内容,针对无人机领域的研究提供了重要的支撑和资源。
此外,SUNRGB-D数据集是由纽约大学发布的一个用于室内场景的3D目标检测数据集。该数据集包含了来自RGB-D传感器的室内真实环境数据,其中包括了各种物体的立体信息和语义标注。SUNRGB-D数据集的出现,丰富了现有的数据集内容,为室内3D目标检测算法的研究提供了重要的支撑和资源。
3D目标检测算法是指基于3D点云数据或者RGB-D图像进行目标检测和识别的算法。其中,一些常见的3D目标检测算法包括PointNet、Frustum PointNet、VoteNet等。这些算法在处理不同类型的数据、不同场景的目标检测上有着各自的优势和特点。
PointNet是一种基于点云数据的深度学习算法,它可以直接处理无序的点云数据,并在此基础上进行目标检测和语义分割等任务。Frustum PointNet是基于PointNet的改进算法,它通过将2D边界框映射到3D空间中的点云来进行目标检测,具有更好的精度和鲁棒性。VoteNet是一种基于二阶特征的3D目标检测算法,它通过投票和聚类的方式来进行点云中的目标检测,具有较高的性能和鲁棒性。
除了这些算法之外,还有一些其他基于深度学习的3D目标检测算法,例如MV3D、AVOD等。这些算法在处理点云数据和RGB-D图像方面有着不同的特点和应用场景,在自动驾驶、无人机和室内环境等领域都有着重要的应用价值。
总之,3D目标检测数据集和算法是计算机视觉领域的研究热点,随着技术的不断发展和数据集的不断丰富,将会有更多更好的3D目标检测算法被提出,并在自动驾驶、无人机等领域得到广泛应用。
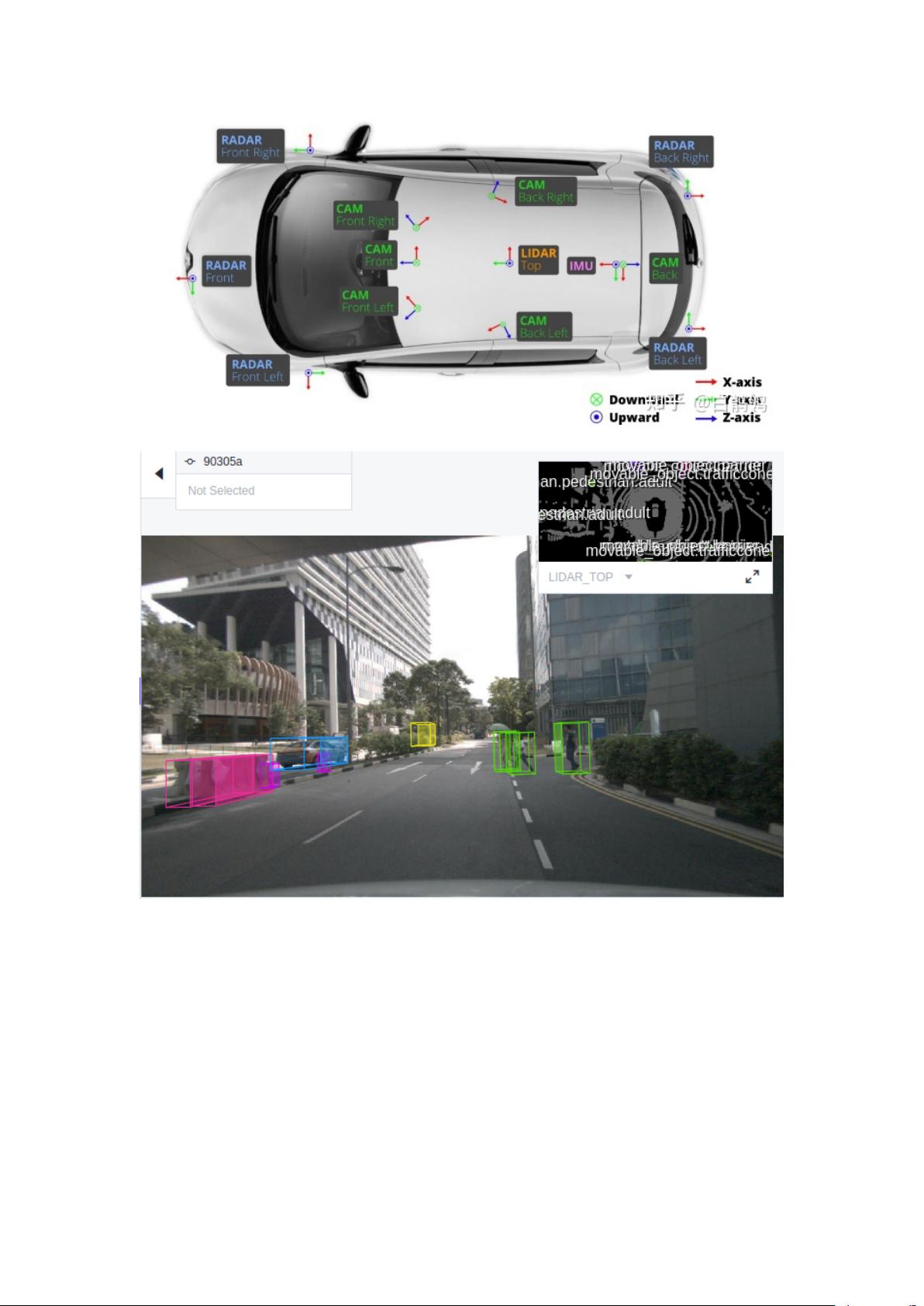
采样车传感器安装方案
数据集图像预览
nuScenes 数据集是由 Motional(前身 nuTonomy)提供的全天候全光照数据集,总数据
量在 300GB 以上。官方提供了数据使用接口,并提供了 Detection, Tracking,
Prediction, Lidar Segmentation 四类任务的挑战榜,还可以支持语义分割,实例分割,多
模态数据融合,端对端决策等问题的研究,
2019 年 3 月正式发布完整版 nuScenes datasdet。nuScenes 数据集有 1000 个场景,每
个场景约 20 秒。750 for train + 150 for validation,150 for test。包括图像、雷达、
激光雷达数据,全部都是 360 度视野。由于相机采样频率为 12Hz,激光雷达采样频率为
20Hz,有一些激光雷达数据没有对应照片帧。train+val 有标记,标记的关键帧采样频率为
2Hz。标记信息包括 2D bounding box,语义分割,实例分割。目标分为 23 类。2020 年先后
补充了地图、车辆总线数据、和激光雷达的 3D 语义分割。地图中包括 11 类道路信息。激光
雷达的分割仅针对 750 for train + 150 for validation 中的关键帧(应该是与 2D 的标注
信息相对应的),分了 32 类语义标签。2020 年 8 月发布了 nuImages v1.0,仅包含图像信
剩余19页未读,继续阅读
2192 浏览量
870 浏览量
1004 浏览量
190 浏览量
266 浏览量
2025-01-15 上传
2024-12-31 上传
2558 浏览量
638 浏览量

david-yue
- 粉丝: 252
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
