使用Unity与Arduino:超声波传感器实现距离测量教程
版权申诉
本篇文章主要介绍了如何在Arduino和Unity环境中使用超声波传感器进行数据传输和交互。首先,我们从硬件连接部分开始:
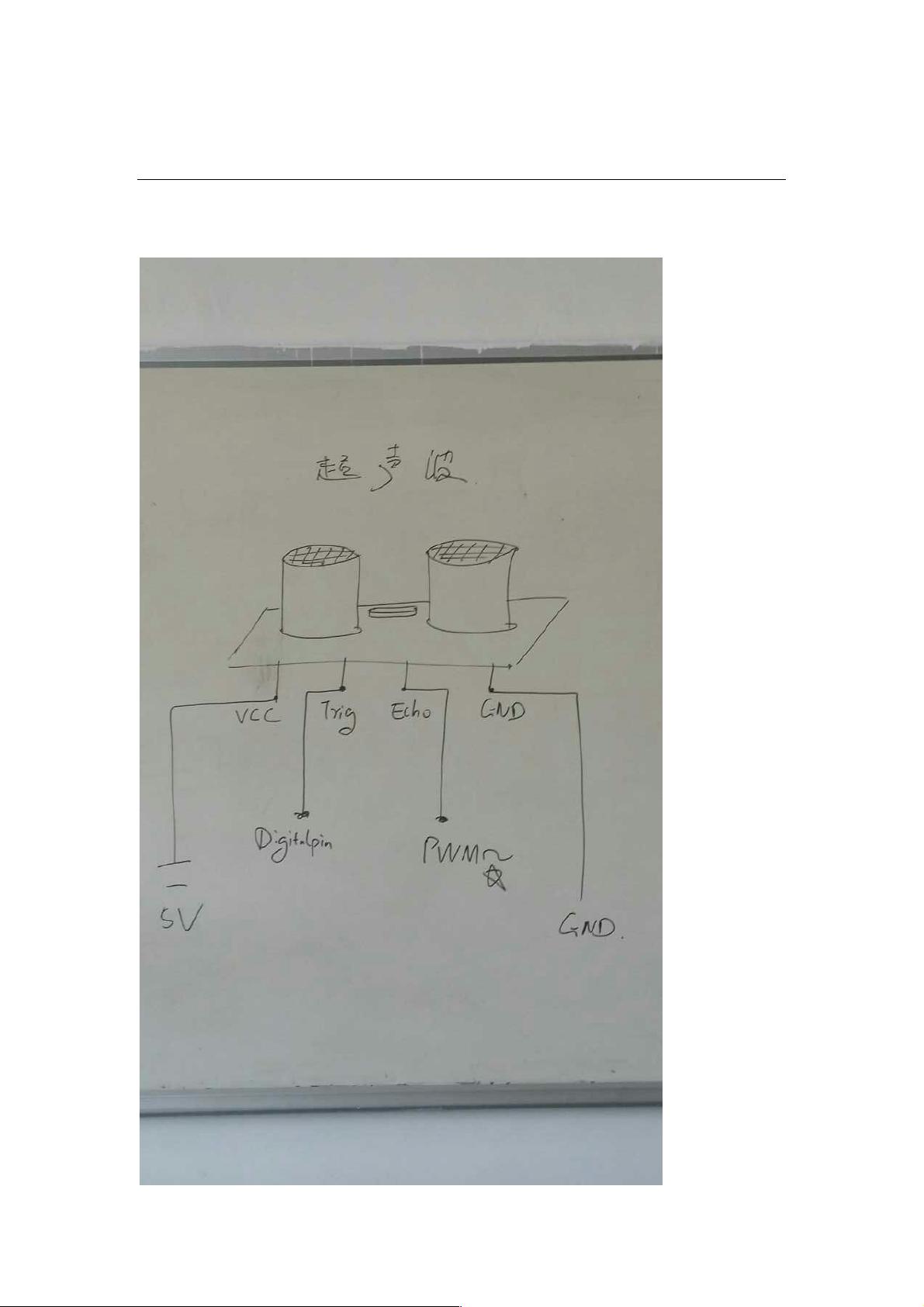
1. **超声波传感器连接**:在Arduino Uno或类似开发板上,需要将超声波传感器的两个引脚与Arduino板进行连接。具体来说,将超声波传感器的`trigger`(通常标有TRIG或ECHO)引脚连接到Arduino的数字引脚2(trigpin),`echo`(返回脉冲信号)引脚连接到数字引脚3(echopin)。确保这两个引脚设置为输入和输出模式。
2. **Arduino代码实现**:提供了一段Arduino C++代码,定义了超声波传感器的引脚,并在`setup()`函数中初始化串口通信,设置波特率为9600。`loop()`函数用于测量超声波的距离,通过检测`echo`引脚接收到的回波信号来计算距离,并进行一定条件下的数据输出。代码中的`distance`值被处理后,通过串口发送到Unity。
接下来,我们转向Unity部分:
3. **Unity环境准备**:在Unity中,创建一个新的项目,选择一个基础场景并添加一个立方体作为视觉表示。调整立方体的大小使其在场景中更明显。然后将项目API设置为.NET 2.0,以支持与Arduino的串口通信。
4. **C#脚本编写**:创建一个名为`Ultrasonic`的C#脚本,继承自`MonoBehaviour`。在这个脚本中,初始化一个`SerialPort`对象,指定与Arduino连接的路径(如"/dev/tty.usbmodem1411"),并设置通信波特率。在`Start()`函数中打开串口,设置读取超时时间为1秒。
5. **Unity脚本交互**:在`Update()`函数中,检查串口是否已打开,如果打开则尝试从串口读取数据。读取到的数据被转换为Unity的三维位置,赋值给立方体的`transform.position`属性,实现了实时接收并显示超声波传感器在Unity场景中的位置信息。如果读取过程中出现异常,脚本会捕获并处理这些异常。
总结起来,本文档详细介绍了如何在Arduino与Unity之间集成超声波传感器,通过串口通信实现实时数据交换,使用户能够在Unity环境中直观地看到传感器探测到的距离信息,这对于开发基于物联网的交互式应用程序非常有用。
Arduino 传感器连接 unity(四)
超声波传感器
1. 根据电路图连接电路
下载后可阅读完整内容,剩余3页未读,立即下载
2023-08-09 上传
2023-08-09 上传
2023-08-09 上传
2024-11-11 上传
2024-11-11 上传
2024-11-11 上传
2024-01-24 上传
2024-07-02 上传
2023-06-01 上传

jane9872
- 粉丝: 109
- 资源: 7797
 我的内容管理
展开
我的内容管理
展开







最新资源
- stm32学习代码.zip
- Python自动化神器-PyAutoGUI(1)
- 简历-求职简历-word-文件-简历模版免费分享-应届生-高颜值简历模版-个人简历模版-简约大气-大学生在校生-求职-实习
- torch_scatter-2.0.7-cp39-cp39-win_amd64whl.zip
- torch_cluster-1.5.9-cp39-cp39-win_amd64whl.zip
- torch_scatter-2.0.7-cp39-cp39-linux_x86_64whl.zip
- torch_cluster-1.5.9-cp39-cp39-linux_x86_64whl.zip
- torch_scatter-2.0.8-cp39-cp39-win_amd64whl.zip
- torch_scatter-2.0.7-cp38-cp38-win_amd64whl.zip
- torch_scatter-2.0.9-cp39-cp39-win_amd64whl.zip
- torch_cluster-1.5.9-cp38-cp38-win_amd64whl.zip
- torch_scatter-2.0.8-cp38-cp38-win_amd64whl.zip
- torch_scatter-2.0.7-cp38-cp38-linux_x86_64whl.zip
- torch_cluster-1.5.9-cp37-cp37m-win_amd64whl.zip
- torch_scatter-2.0.9-cp39-cp39-linux_x86_64whl.zip
- torch_scatter-2.0.7-cp37-cp37m-linux_x86_64whl.zip
