机器人视觉技术:硬件与软件设计
需积分: 10 94 浏览量
更新于2024-07-18
收藏 48.87MB PDF 举报
"Robot Vision"是一本关于机器人视觉技术的书籍,由Aleš Ude编辑,In-Tech出版社出版。本书涵盖了机器人视觉的多个关键领域,包括视觉运动分析、视觉导航、传感器融合、图像稳定和多任务主动视觉技术,旨在探讨机器人如何通过视觉系统理解和与环境互动。
在计算机视觉和机器视觉的背景下,机器人视觉是让机器人具备类似人类视觉感知的技术。视觉运动分析是其中的基础,它涉及到如何从摄像头捕获的图像中提取信息,理解物体的运动,并据此调整机器人的动作。这一过程通常包括特征检测、目标识别和三维重建等步骤。
视觉导航则是机器人自主移动的关键,它依赖于对周围环境的理解,如地标识别、路径规划和避障。这需要复杂的算法来处理和解析图像数据,确保机器人能在不同的环境中安全有效地移动。
传感器融合是另一个重要概念,它涉及到将来自不同类型的传感器(如摄像头、激光雷达或红外传感器)的数据整合在一起,提高机器人的感知能力和决策质量。这种融合可以增强系统的鲁棒性,减少单一传感器的局限性。
图像增稳是确保图像质量和分析精度的技术,尤其在机器人在移动或者环境不稳定时。它可能包括硬件稳定机制(如光学防抖)或软件算法(如图像校正和去噪)。
多任务主动视觉技术允许机器人同时处理多个视觉任务,比如识别、跟踪和分类物体,同时进行环境地图构建。这需要高效的计算资源和智能的决策系统,以便在复杂环境中有效地分配计算资源。
书中可能深入讨论了这些领域的理论基础、算法实现以及实际应用案例,为读者提供了全面了解和应用机器人视觉技术的宝贵资源。尽管出版者和编辑不承担任何由于使用书中信息导致的损害责任,但作者有权在出版后再次发布或使用其作品的部分或全部内容。
"Robot Vision"这本书是机器人技术、计算机视觉和人工智能领域的宝贵参考资料,对于研究者、工程师和对机器人技术感兴趣的读者来说,提供了深入理解机器人视觉系统及其应用的丰富知识。

RobotVision6
3.3 PDMS lens mold and PDMS soft lens processing
The lens mold contains two pair of mold inserts, one pair is for PDMS spherical lens and
another is for PDMS flat lens. Each pair has the upper and the lower mold inserts. The
material of mold insert is copper (Moldmax XL) and is fabricated by ultra-precision
diamond turning machine. Fig.4. shows the fabrication process. Since the PDMS lens is
fabricated by casting, the parting line between the upper and the lower mold inserts need
have an air trap for over welling the extra amount PDMS. At the corner of the mold are four
guiding pins to orientate the mold plates.
The fabrication processes is shown at Fig.5. The fabrication process of PDMS lens is mixing,
stirring, degassing and heating for curing. At first, base A and curing agent B is mixed and
stirred with 10:1 by weight, then degas with a vacuum pump. After preparing the PDMS,
cast PDMS into the mold cavity slowly and carefully, then close the mold and put into oven
for curing. As the result, at curing temperature 100°C, PDMS lens can be formed after 60
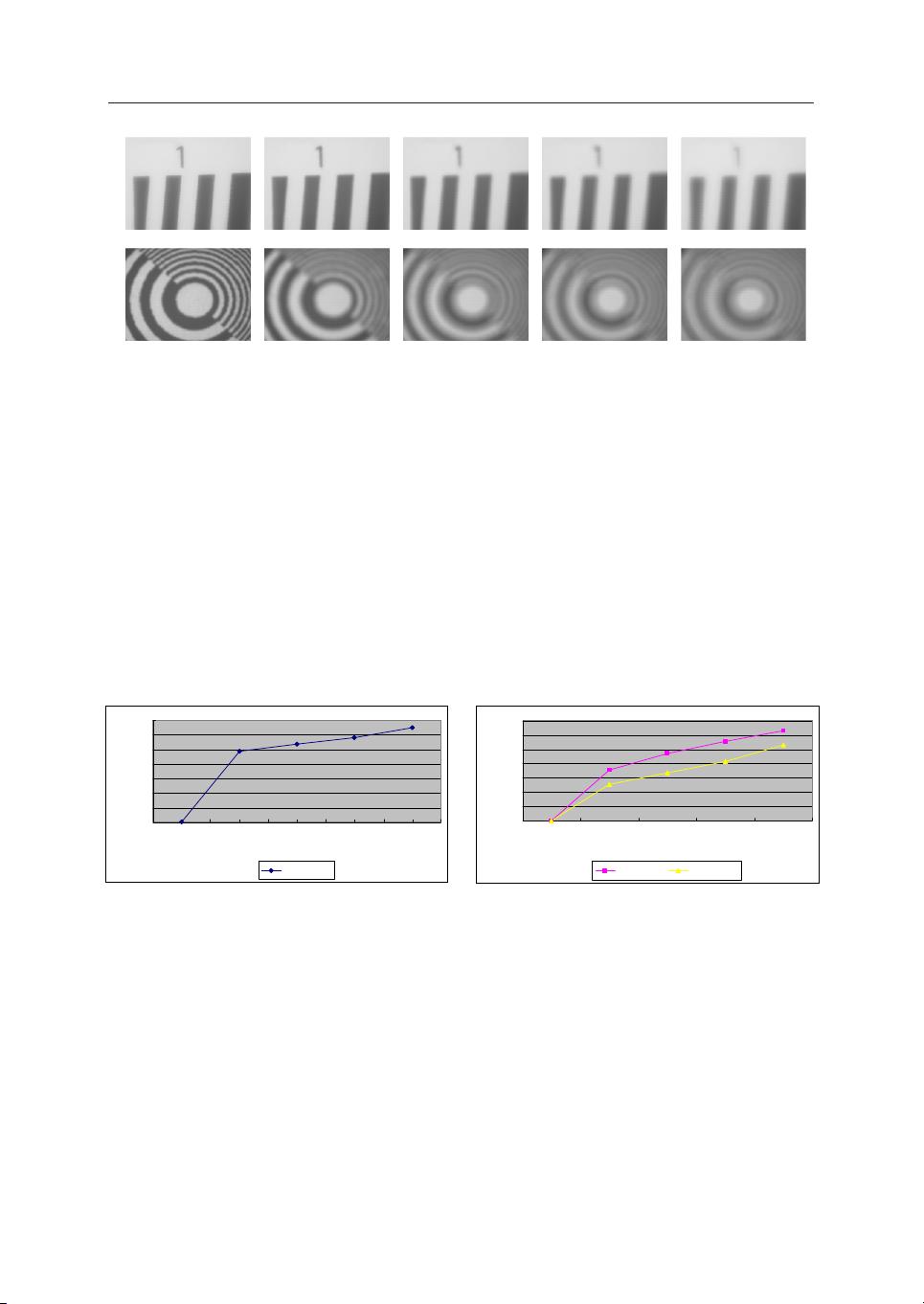
min. Fig.6. is the PDMS lens of SZL unit. There are spherical lens and flat lens for
experimental tests and they are fabricated at the same molding procedure.
(a) PDMS cast into mold cavity (b) Mold cavity full of PDMS
(c) Curing in oven (d) After curing
Fig. 5. Fabrication processes of PDMS lens.
(a) PDMS flat lens (b) PDMS sphere lens
Fig. 6. PDMS lens of soft zoom lens system.

剩余623页未读,继续阅读
103 浏览量
104 浏览量
125 浏览量
2021-02-17 上传
133 浏览量
122 浏览量
447 浏览量
151 浏览量

foryou159
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android PRDownloader库:支持文件下载暂停与恢复功能
- Xilinx FPGA开发实战教程(第2版)精解指南
- Aprilstore常用工具库的Java实现概述
- STM32定时开关模块DXP及完整项目资源下载指南
- 掌握IHS与PCA加权图像融合技术的Matlab实现
- JSP+MySQL+Tomcat打造简易BBS论坛及配置教程
- Volley网络通信库在Android上的实践应用
- 轻松清除或修改Windows系统登陆密码工具介绍
- Samba 4 2级免费教程:Ubuntu与Windows整合
- LeakCanary库使用演示:Android内存泄漏检测
- .Net设计要点解析与日常积累分享
- STM32 LED循环左移项目源代码与使用指南
- 中文版Windows Server服务卸载工具使用攻略
- Android应用网络状态监听与质量评估技术
- 多功能单片机电子定时器设计与实现
- Ubuntu Docker镜像整合XRDP和MATE桌面环境
