现场总线CAN-bus:从罐头到通信技术
需积分: 12 6 浏览量
更新于2024-07-16
收藏 2.63MB PDF 举报
"CAN-bus简介.pdf"
现场总线CAN-bus是一种广泛应用在工业自动化领域的通信技术,它替代了传统的点对点通信方式,显著减少了硬件连接的复杂性。本资料详细介绍了CAN总线的起源、特点以及其在工业现场的应用。
从"罐头"的比喻出发,可以形象地理解现场总线的工作原理。就像童年的“传声筒”,信息通过一个介质(即“绳子”)传播,多个“罐头”(设备)都可以接收到信息,并根据自身需求筛选和处理。在现场总线系统中,这一介质变成了电缆,设备间的信息传递则通过共享的通信通道完成,这便是总线连接的优势所在。与点对点连接相比,总线连接大大减少了所需线缆的数量,简化了布线,降低了成本。
CAN总线是Controller Area Network的缩写,最初由Bosch公司开发,用于汽车电子系统。CAN总线有高速CAN和低速CAN两种类型,分别对应不同的电气标准和应用场景。高速CAN通常用于车辆内部的实时通信,具有高数据传输速率和强抗干扰能力;低速CAN则适用于需要较低功耗和传输速率的应用,如传感器和执行器之间的通信。
通信系统通常按照OSI七层模型来组织,CAN总线主要涉及物理层和数据链路层。物理层定义了信号的电气特性,包括电压水平、信号形式以及传输介质等;数据链路层则负责帧结构的定义、错误检测和纠正,以及确保数据可靠传输。CAN协议在数据链路层的设计尤为独特,采用非破坏性仲裁机制,使得多个节点可以在总线上同时发送数据,而不会产生冲突。
现场总线的主要特点是其分布式控制和网络化通信,它允许不同设备之间直接通信,无需中央处理器协调。这种架构增强了系统的灵活性和可扩展性,能够适应复杂的工业环境。在实际应用中,例如在生产线上,多个传感器和执行器可以通过CAN总线连接,实现高效、实时的数据交换,从而提高生产效率和自动化程度。
CAN总线以其高效、可靠的通信特性,广泛应用于汽车、楼宇自动化、医疗设备和工业自动化等多个领域。通过深入理解CAN总线的工作原理和相关技术,工程师们能够更好地设计和集成总线系统,以满足不断增长的智能化和网络化需求。
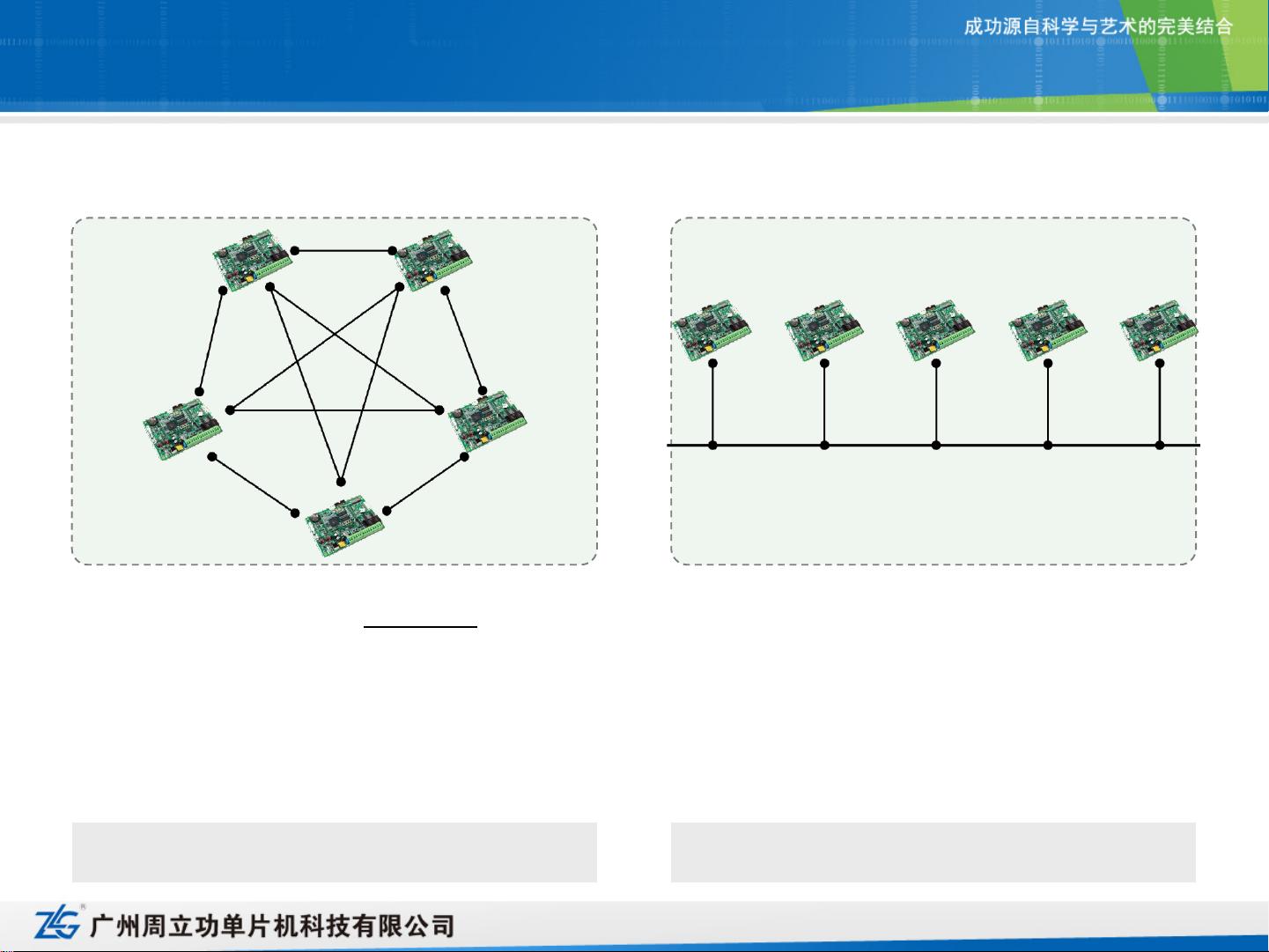
点对点连接 VS 总线连接
点对点连接 总线连接
两两连线,需要 根线
2
)1n(n −
仅需 ≤ n+1根线
当 n = 5 时,需要 10 根线
当 n = 10 时,需要 45 根线
当 n = 20 时,需要 190 根线
连线多,线路复杂
总线
:bus。信息在一条公共通道上传
输,信息接收者从通道上接收所有信息,
并根据规则过滤发送给自己的信息。
连线少,结构清晰

剩余69页未读,继续阅读
354 浏览量
107 浏览量
2023-08-26 上传
251 浏览量
2022-09-23 上传
367 浏览量
2022-09-24 上传
2022-01-07 上传
3196 浏览量

AutoFAE进阶之路
- 粉丝: 1w+
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于.Net Core 物联网IOT基础平台
- web-portfolio:从最基础到最高级的五个项目组合
- self-website-manager:个人网站后台管理部分
- Algorithm-my-code-store.zip
- react-native-push-notification:React本机本地和远程通知
- Webui
- 行业文档-设计装置-玉米秸秆发酵分解剂及在制备玉米秸秆猪饲料中的应用.zip
- 鼠标移动到图片上旋转显示大图的jQuery图片特效
- Dreamweaver网页设计-形考任务十
- HP-U盘格式化启动盘工具1571301907.zip
- 现代控制理论讲义
- UltimateAndroidReference:Ultimate Android参考-您成为更好的Android开发者的道路
- iOS 视图控制器 HSDatePickerViewController.zip
- 丹佛斯变频器VLT_FC280_PROFINET通信_GSD文件.zip
- PHP登录系统:执行基本身份验证
- quickstart-android:Android的Firebase快速入门示例
