智能无人系统:传感器融合与目标跟踪技术详解
需积分: 5 54 浏览量
更新于2024-07-09
收藏 3.71MB PDF 举报
本资源是一份关于"20200117_智能无人系统的传感器融合与目标跟踪"的PPT,详细介绍了智能无人系统的关键技术,特别是围绕传感器融合和目标跟踪展开。首先,讲座概述了智能无人系统的核心能力,包括感应、感知、学习算法、优化、控制算法以及决策和规划。这些能力是通过集成多种传感器来实现的,如加速度计、磁力计、陀螺仪、GPS、雷达、摄像头、红外摄像头、声呐和激光雷达等。
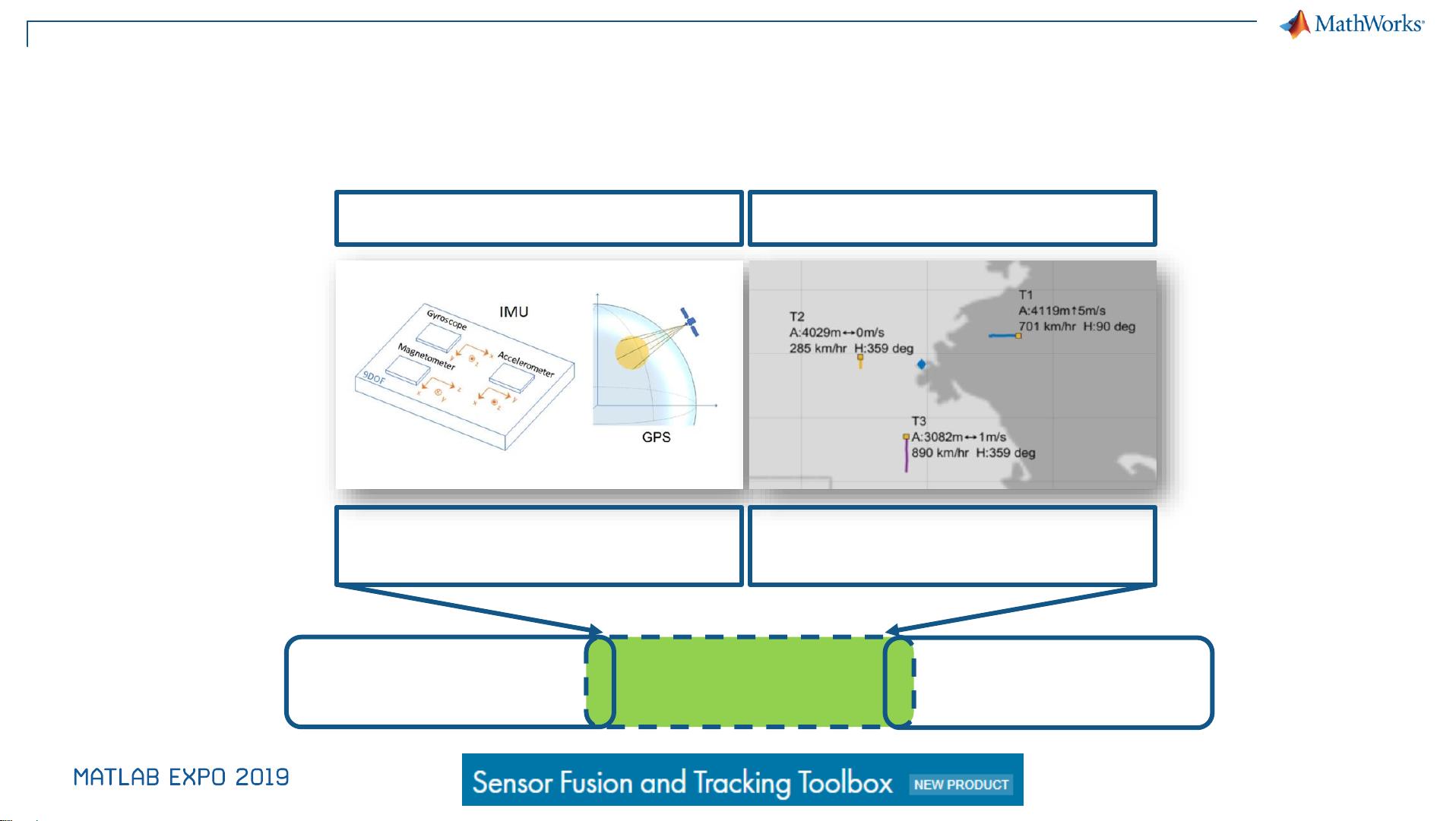
传感器融合是关键技术之一,它旨在将来自不同传感器的数据融合在一起,以提供更准确和鲁棒的目标位置估计。雷达和视觉测量(如摄像头)在目标跟踪中的作用被详细解释,展示了它们在不同时间步长上的测量结果如何通过融合得到更精确的估计,并通过椭圆表示不确定性。
内容还涵盖了定位技术,包括流程、IMU(惯性测量单元)与GPS传感器模型,以及六自由度(6-DOF)、九自由度(9-DOF)和十自由度(10-DOF)的方向估计方法。通过融合IMU数据和视觉里程估计(Visual Odometry),可以提高姿态估计的精度。定位算法开发流程强调了从实际硬件获取数据、预处理、数据融合、仿真和结果评估等步骤。
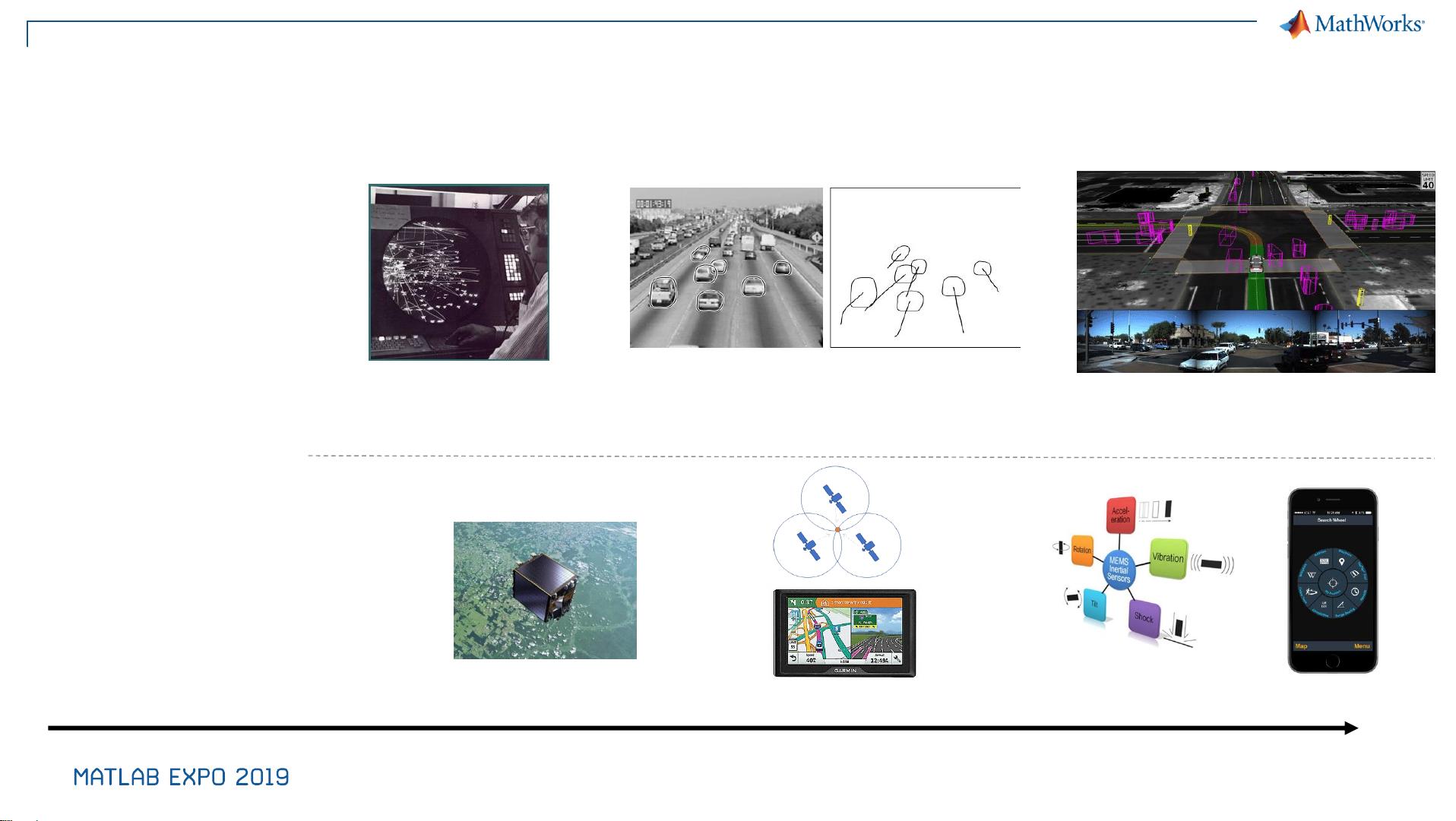
整个PPT还回顾了技术的发展历程,从军事应用到商业领域,再到现代社会中的广泛应用,例如在交通运输中的计算机视觉、多目标跟踪、航空交通管理等方面。通过展示不同传感器的优势互补,以及如何通过融合技术提升无人系统的定位性能,这份资料提供了深入理解智能无人系统核心功能的重要视角。
这份PPT不仅探讨了理论概念,还包含了实际操作层面的开发流程和技术细节,对于从事智能无人系统设计、研发或研究的人员来说,是一份极具价值的学习资料。
9
传感器融合
与
目标跟踪
自我感知 环境感知
加速剂, 磁力计, 陀螺仪, GPS…
雷达, 摄像头, 红外摄像头, 声呐,
激光雷达, …
信号与图像处理
控制
传感器融合与目标跟踪是…
剩余43页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-08-08 上传
2022-11-24 上传
2020-08-25 上传
2021-07-10 上传
2021-09-21 上传
2021-09-24 上传

翟羽嚄
- 粉丝: 1w+
- 资源: 44
 我的内容管理
展开
我的内容管理
展开







最新资源
- 创建个性化的Discord聊天机器人教程
- RequireJS实现单页应用延迟加载模块示例教程
- 基于Java+Applet的聊天系统毕业设计项目
- 从HTML到JSX的转换实战教程
- 轻量级滚动到顶部按钮插件-无广告体验
- 探索皇帝多云的天空:MMP 100网站深度解析
- 掌握JavaScript构造函数与原型链的实战应用
- 用香草JS和测试优先方法开发的剪刀石头布游戏
- SensorTagTool: 实现TI SensorTags数据获取的OS X命令行工具
- Vue模块构建与安装教程
- JavaWeb图片浏览小程序毕业设计教程
- 解决 Browserify require与browserify-shim冲突的方法
- Ventuno外卖下载器扩展程序使用体验
- IIT孟买医院模拟申请webapp功能介绍
- 掌握Create React App: 开发Tic-Tac-Toe游戏
- 实现顺序编程与异步操作的wait.for在HarmonyOS2及JavaScript中
