MATLAB在三环位置随动系统仿真设计中的应用
需积分: 12 153 浏览量
更新于2024-07-01
1
收藏 2.42MB DOC 举报
"位置随动系统的MATLAB计算与仿真设计说明书"
位置随动系统是一种关键的自动化控制装置,常用于各种需要精确位置控制的场合。它通过反馈闭环控制机制,确保输出位置能紧密跟随输入指令的变化。在现代科技发展中,位置随动系统在工业、国防、航空航天以及高科技领域都有着不可或缺的地位,尤其是在机电一体化技术日益发达的今天。
本次设计关注的经典三环位置随动系统,由速度环、电流环和新增的位置环构成。在直流调速系统的基础上,这种三环结构能提供更高的控制精度和更好的动态性能。位置环作为核心部分,其主要任务是通过比较给定信号和实际位置信号来调整电机动作,实现精确的位置跟踪。根据控制方式,位置随动系统可分为模拟式和数字式,本设计采用的是模拟式系统,适用于处理大功率应用场景。
在系统设计中,电流环和速度环的调节器通常按照工程法进行,采用PI调节器,以确保系统的稳定性。而位置环则采用更为复杂的PID调节器,并构建为典型II型系统,以提高系统的快速响应能力并减少误差。这样的设计有助于平衡系统响应速度和精度,确保系统在不同工况下的性能表现。
MATLAB作为一个强大的数学计算和仿真平台,其在动态系统仿真的能力尤为突出。利用MATLAB,我们可以对设计的三环位置随动系统进行详尽的仿真,验证其性能,包括静态特性、动态响应以及抗干扰能力等。通过MATLAB的Simulink模块,可以直观地建立系统模型,进行实时仿真,观察系统在不同条件下的行为,从而优化控制器参数,确保系统满足设计要求。
在实际操作中,首先需要搭建系统的数学模型,包括电机模型、传感器模型以及控制器模型。接着,通过MATLAB的连续时间或离散时间仿真,分析系统在各种设定输入下的响应。仿真结果可以以波形图、根轨迹图等形式展示,便于分析系统的稳态性能和动态特性。此外,MATLAB还提供了优化工具,可以帮助我们调整PID参数,以达到最佳控制效果。
位置随动系统是实现精确位置控制的关键技术,MATLAB则是进行系统设计、分析和优化的强大工具。通过MATLAB的计算与仿真,不仅可以深入理解系统的动态行为,还能确保系统在实际应用中具备优良的跟踪性能和稳定性。
10 / 55
和
)(
2
sW
可分别写成
)(
)(
)(
1
11
1
sDs
sNK
sW
p
�
,
)(
)(
)(
2
22
2
sDs
sNK
sW
q
�
式中
p
和
q
为
)(
1
sW
,
)(
2
sW
中所含积分环节的数目;
)(
1
sN
,
)(
2
sN
,
)(
1
sD
,
)(
2
sD
均为单位项为1的
s
多项式;
1
K
,
2
K
分别为
)(
1
sW
,
)(
2
sW
的增益 ,且令
KKK �
21
。
当
s
趋近于0时,各项多项式均趋近于1,则给定误差和扰动误差的表达式可以改写成
K
ss
e
m
qp
s
sr
)(
lim
*1
0
�
��
�
�
(1-7)
1
1
0
)(
lim
K
sFs
e
p
s
sf
�
�
�
(1-8)
式(1-7)和式(1-8)表明:1)给定误差
sr
e
与系统的开环增益
K
和前项通道中所有
积分环节的总数
qp �
有关;2)扰动误差
sf
e
则只与扰动作用点以前部分的增益
1
K
与
其积分环节数目
P
有关。
在自动控制原理中,根据系统开环传递函数中的积分环节的数目,对于
0�� QP
,
1,2,3…等不同数值分别称作0型、I型、II型、…系统,因此,系统误差就决定于这
样定义的系统类型。对于位置随动系统来说,由于转角是转速对时间的积分,控制对
象中的最后一个环节一定是积分环节,所以
0�� qp
, 不可能出现0型系统。而III型
和III型以上的系统是很难稳定的,因此,通常多用I型和II型系统。但是,
sr
e
和
sf
e
最
终为何值还要看
)(
*
s
m
�
和
)(sF
所含
s
的阶次,也就是说,还取决于给定和扰动输入信
号的类型。
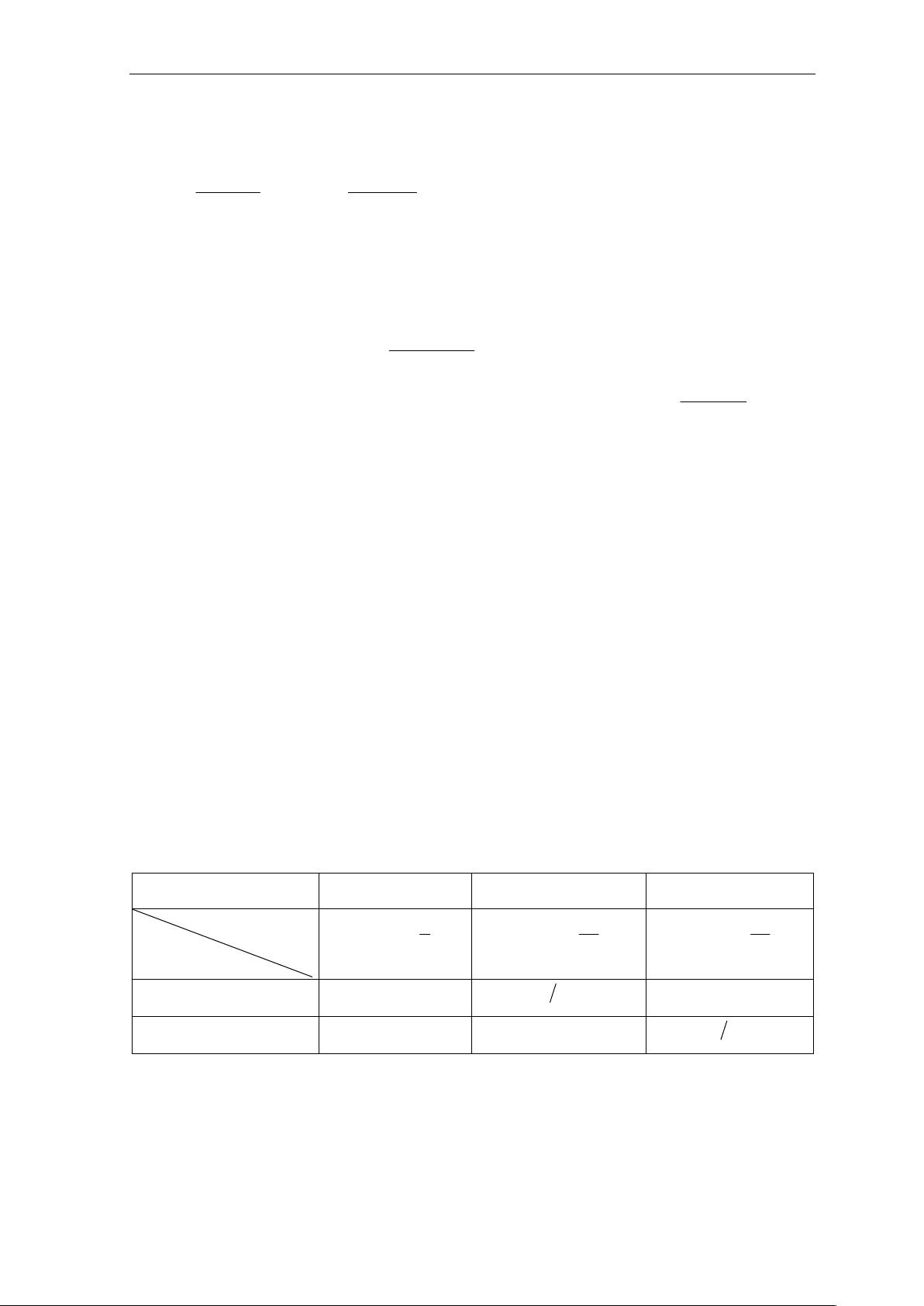
位置随动系统的典型给定输入信号有以下三种类型,位置阶跃输入、速度输入、
加速度输入。我们把它们的给定稳态误差一起列于表1-2中。
表1-2给定稳态误差
sr
e
输入信号
单位阶跃输入
单位速度输入
单位加速度输入
给定误差
系统类型
s
s
m
1
)(
*
�
�
2
*
1
)(
s
s
m
�
�
3
*
1
)(
s
s
m
�
�
I型系统
0
K1
�
II型系统
0
0
K1
表1-2给定误差的物理意义是,I型位置随动系统只有转速到位移之间的一个积分
环节。在位置阶跃输入下,只要
0��
m
�
就有控制电压,电机就要转动,由于负载等
扰动的影响已计入扰动误差,现在不考虑任何扰动,电机将一直转到偏差电压等于零
时为止,因此稳态的给定误差为零。如果是速度输入,给定位置信号
*
m
�
不断增长,

剩余54页未读,继续阅读
2022-07-10 上传
2023-07-10 上传
2021-08-29 上传
2021-09-27 上传
2023-07-05 上传
2022-07-05 上传
2022-07-05 上传

智慧安全方案
- 粉丝: 3820
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







