库卡机器人倍福模块详细配置教程
需积分: 5 65 浏览量
更新于2024-07-15
4
收藏 2.98MB PDF 举报
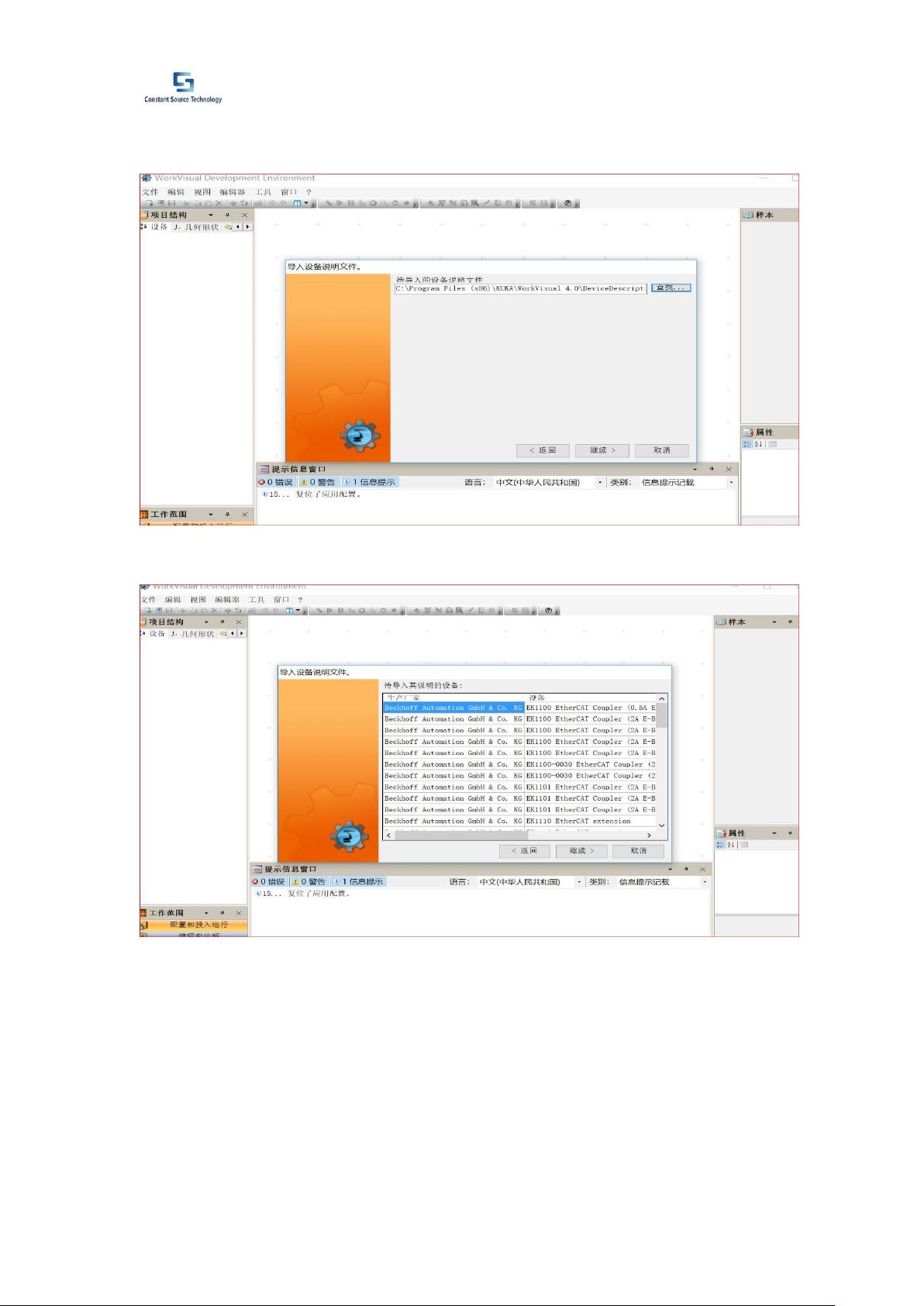
该文档详细介绍了如何配置库卡机器人的倍福模块,包括了使用WorkVisual软件进行操作的具体步骤。首先,用户需打开WorkVisual软件并确保关闭DTM样本管理以及项目管理器。接着,通过"Import/Export"选项导入设备说明文件,找到并选择所需的GSDML文件夹中的倍福模块,如EK1101、EL1809、EL2024、EL2809和PROFINET,注意版本应为V0.16。
配置过程中,用户需要重复导入设备说明文件,然后将选定的模块导入到"已知DTM"中。通过查找安装的DTM样本管理框,确保所有需要的模块都被选中。连接电脑和机器人控制柜后,用户还需要检查软件中单元的序列号与硬件上的匹配性。
接下来,通过"查找项目"和"更新"功能确认项目的正确性,然后激活对应的控制器,并在项目视图中设置现场总线连接。具体操作涉及数字输入和输出的映射,例如将$IN[1]映射到EL1809的Channel1.Input,然后依次扩展到16个输入。对于数字输出,同样选择$OUT[1]与EL2809的Channel1.Output进行连接。
整个过程涉及从软件导入设备信息,到实际物理连接和配置映射,确保通信链路的准确性和兼容性。这是一项关键的系统集成任务,对于确保库卡机器人的高效运行和数据传输至关重要。在整个配置完成后,用户可以验证连接是否稳定,以确保倍福模块的正常工作。
配置倍福模块步骤
八. 点击继续。
九. 点击继续。
剩余15页未读,继续阅读
2018-01-30 上传
2021-09-29 上传
2022-06-19 上传
2021-08-09 上传
179 浏览量
2021-07-15 上传

weixin_45814570
- 粉丝: 12
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- Postman安装与功能详解:适用于API测试与HTTP请求
- Dart打造简易Web服务器教程:simple-server-dart
- FFmpeg 4.4 快速搭建与环境变量配置教程
- 牛顿井在围棋中的应用:利用牛顿多项式求根技术
- SpringBoot结合MySQL实现MQTT消息持久化教程
- C语言实现水仙花数输出方法详解
- Avatar_Utils库1.0.10版本发布,Python开发者必备工具
- Python爬虫实现漫画榜单数据处理与可视化分析
- 解压缩教材程序文件的正确方法
- 快速搭建Spring Boot Web项目实战指南
- Avatar Utils 1.8.1 工具包的安装与使用指南
- GatewayWorker扩展包压缩文件的下载与使用指南
- 实现饮食目标的开源Visual Basic编码程序
- 打造个性化O'RLY动物封面生成器
- Avatar_Utils库打包文件安装与使用指南
- Python端口扫描工具的设计与实现要点解析
