双侧集装箱自装卸搬运车吊装机构设计与分析:青岛理工大学毕业设计论文
版权申诉
62 浏览量
更新于2024-04-04
收藏 4.34MB DOC 举报
he corresponding container self-loading and unloading handling vehicles occupy an important position in various transportation industries in China to a certain extent. The front and rear arms often show a lack of synchronization during the corresponding operations, resulting in lateral deviation. Therefore, based on the design and development of container side lifting and other self-loading and unloading equipment, this project has developed a double-sided container self-loading and unloading handling vehicle, which can realize the loading and unloading transport of containers on both sides of different specifications. It has the advantages of fast loading and unloading speed, high working efficiency, strong site applicability, high safety, and very optimistic application prospects. After the design calculations of this project are completed, three-dimensional solid modeling is carried out using CATIA software, and based on mechanical simplification and the structural characteristics of the self-loading and unloading lifting mechanism, the two major dangerous working conditions of the lifting arm are determined. Static analysis is conducted to identify the critical cross-sections and verify the strength and stiffness of the lifting arm. In order to ensure the stability and reliability of the double-sided container self-loading and unloading handling vehicle during the corresponding loading and unloading operations, it is necessary to ensure that the lifting arms on both sides can operate synchronously. Keywords: self-loading container; handling vehicle; lifting mechanism; mechanical design.
第二章 吊装机构设计及液压系统分析
老式的单侧自装卸搬运车所采用的吊装机构,大部分只装卸固定尺寸的集装箱,或是吊装
机构不能完成实时作业,极大地削弱了吊装机构的机动性能。为使吊装机构具有更高的操作性
以及机动性,本课题为双侧自装卸搬运车设计了一种吊装机构,可实现集装箱进行双侧变幅装
卸、堆垛工作。
2.1 集装箱自装卸吊装机构的组成
集装箱自装卸搬运车分为两个单元,一个是牵引车其二是半挂,所谓的半挂有涵盖吊装、
滑动、液压机构,除此之外还具备一定的相对独立的动力装置。吊装机构是整个车辆的核心部
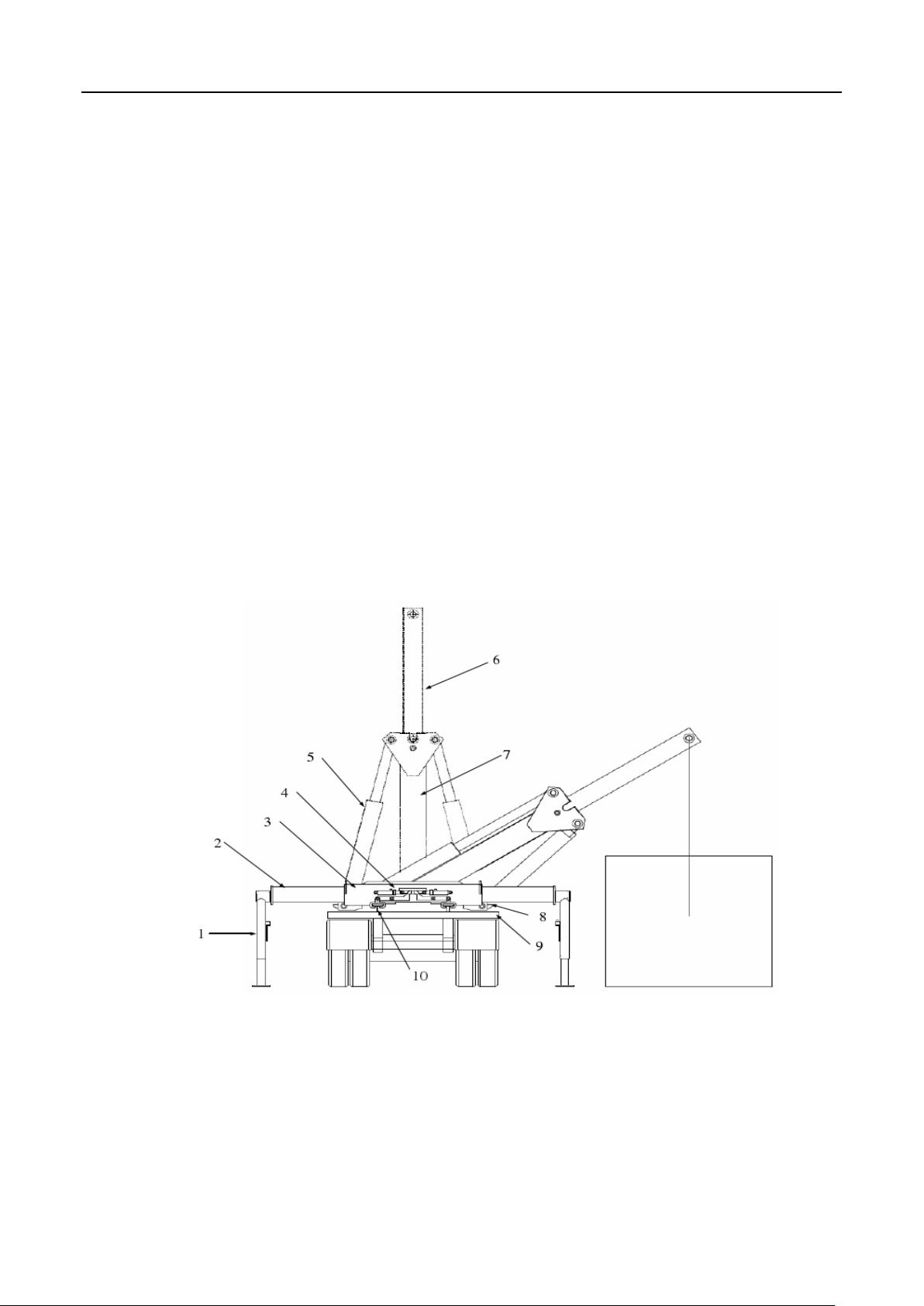
件,决定了搬运车的整车性能,它分为前、后折臂吊组。折臂吊组主要是由起吊总成、基座总
成、支腿总成和锁紧装置等,如图 2.1,此为吊装机构未工作时(90°)与起吊时的情况
[12]
。
1- 支腿内延伸油缸
,
2 - 横向支腿
,
3 -固定支腿
,
4 - 锁紧装置
,
5 - 变幅油缸
,
6 - 伸缩臂
,
7 - 摆动臂
,
8 - 基座
,
9 - 底盘导轨
图 2.1 自装卸搬运车吊装机构简图
(1)起吊总成
起吊总成用于进行装卸起吊,结构包括变幅油缸、摆动臂和伸缩臂。变幅油缸有两个,分

剩余48页未读,继续阅读
2023-07-05 上传
2019-09-20 上传
2021-11-20 上传
2023-05-29 上传
2023-04-28 上传
2023-03-29 上传
2023-05-05 上传
2023-09-12 上传
2023-06-10 上传


毕业程序员
- 粉丝: 1w+
- 资源: 1938
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
