多变量系统辨识与PID解耦控制在工业电子中的研究进展
84 浏览量
更新于2024-08-31
收藏 514KB PDF 举报
在工业电子领域,随着现代工业系统的复杂性和多样性提升,多变量系统辨识与控制的研究变得至关重要。传统的单变量控制方法已不足以应对那些包含强耦合性、不确定性、非线性特性的工业控制系统,这些系统通常存在信息不完整性和大滞后性等问题。多变量控制方法的引入,如预测控制和内模控制,依赖于系统的精确模型,因此模型辨识是实施有效控制的基础。
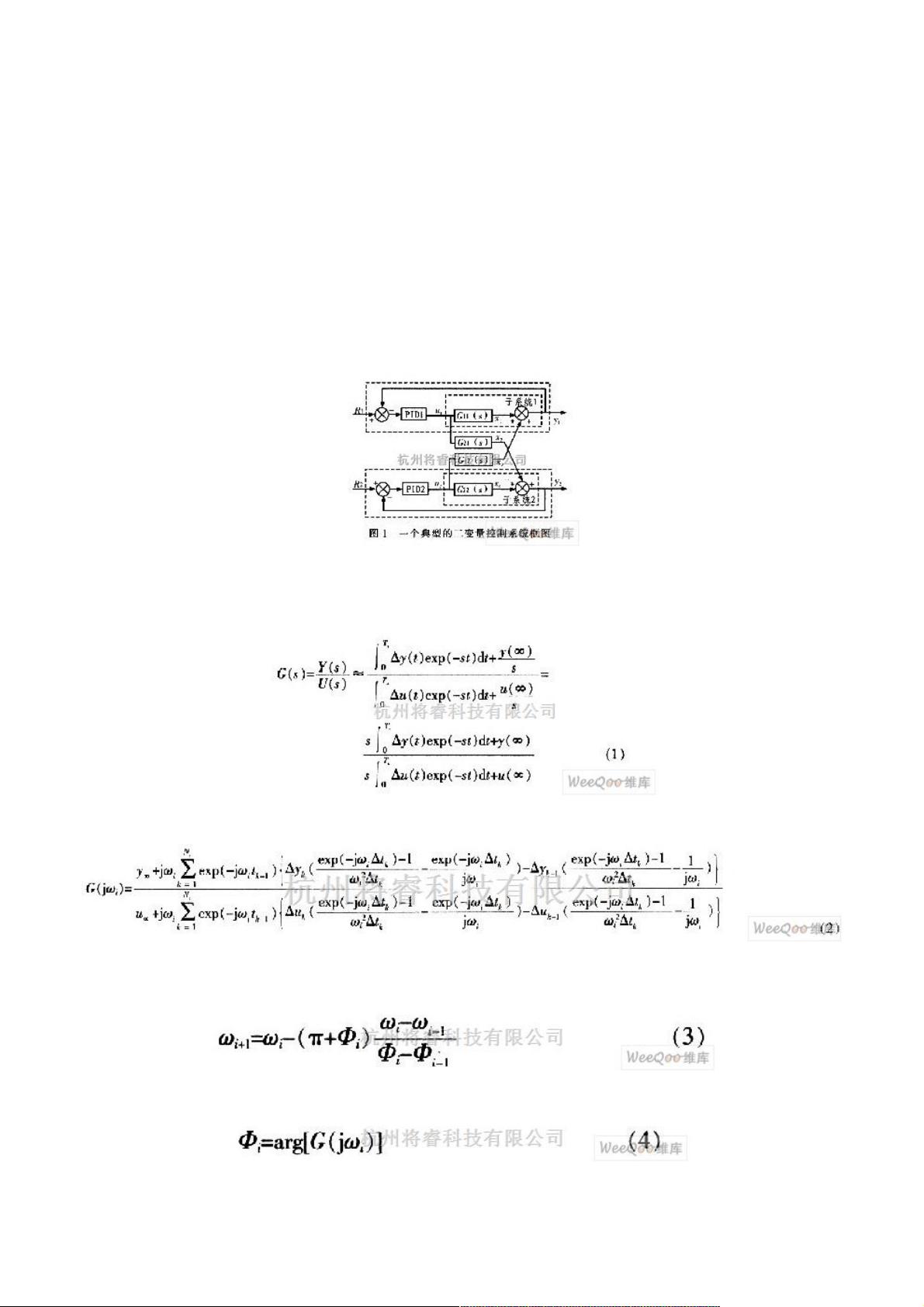
模型辨识是多变量系统控制的核心步骤之一,主要任务是确定各个子系统的传递函数,如图1所示的G11(s), G21(s), G12(s), G22(s)。其中,常用的辨识方法是频域阶跃响应分析,通过施加特定输入信号(如阶跃信号),测量系统的输出响应,然后利用数学模型(如二阶加滞后模型)来拟合数据,求得传递函数的系数。在实际操作中,可能需要对系统频率响应进行采样,如将π分为M个区间,计算相应的频率和相位角。
PID(比例-积分-微分)控制器是工业电子系统中的常见控制手段,其离散化后的传递函数关系可以通过一定的数学变换得到。在模型辨识过程中,通过实验测量得到的系统动态响应数据,可以用来估计PID控制器的参数,进而优化控制性能。
然而,由于实际系统中可能存在滞后环节,这会增加模型的复杂性,并可能导致控制的困难。滞后环节的处理通常是通过近似或采用特殊的解耦技术来简化模型,以便于控制设计。这可能涉及到诸如观测器设计、状态空间模型转换或利用特殊的滤波器结构来削弱滞后的影响。
多变量系统辨识不仅是获取系统动态行为的关键,也是实施有效PID解耦控制的基础。通过精确的模型建立和合理的控制策略,可以显著改善复杂工业系统的控制性能,提高生产效率并减少运行风险。未来的研究将继续探索更为先进的模型识别方法和控制算法,以适应不断变化的工业环境需求。
工业电子中的多变量系统辨识及其工业电子中的多变量系统辨识及其PID解耦控制的研究解耦控制的研究
随着现代工业的发展,越来越多的工业系统、社会和经济系统己不再局限于单变量系统,而是结构复杂,模型
不确定的多变量系统。传统控制方法虽然在很大程度上能满足工业系统的控制要求,但对一些具有强耦合性、
不确定性、非线性、信息不完全性和大滞后性等特征的工业控制系统,传统控制方法对其无法得到满意的控制
效果所以多变量系统控制的研究越来越受到重视。而要对多变量系统进行控制,尤其是实施一些先进控制算
法,如预测控制、内模控制等都是基于模型的,所以系统的模型是实施多变量控制的前提条件。 1 模型辨
识方法 图1是一个典型的二变量控制系统框图。从图1看出,模型的辨识就是辨识出G11(s)、G21(s)、G
随着现代工业的发展,越来越多的工业系统、社会和经济系统己不再局限于单变量系统,而是结构复杂,模型不确定的多
变量系统。传统控制方法虽然在很大程度上能满足工业系统的控制要求,但对一些具有强耦合性、不确定性、非线性、信息不
完全性和大滞后性等特征的工业控制系统,传统控制方法对其无法得到满意的控制效果所以多变量系统控制的研究越来越受到
重视。而要对多变量系统进行控制,尤其是实施一些先进控制算法,如预测控制、内模控制等都是基于模型的,所以系统的模
型是实施多变量控制的前提条件。
1 模型辨识方法模型辨识方法
图1是一个典型的二变量控制系统框图。从图1看出,模型的辨识就是辨识出G11(s)、G21(s)、G12(s)、G22(s)这4个传递
函数。这里采用基于频域的阶跃响应方法进行辨识。对于PID控制系统,其控制器输出u和过程输出y之间的传递函数G(s)表示
为:
将其离散化后用jω代替s变为
对于过程频率响应,取ωi的范围为[-π,0]能够充分体现系统频率特性,为了获得更精确结果,把π分成M个区间。计算ωi
值
其对应的相位角
由于控制过程中大部分系统可以用二阶加滞后模型代替,所以设模型传递函数为
下载后可阅读完整内容,剩余5页未读,立即下载
2021-04-16 上传
2021-12-12 上传
点击了解资源详情
2022-09-22 上传
点击了解资源详情
2023-09-05 上传
2022-01-14 上传
2023-09-15 上传
2023-11-07 上传









