路面识别下粒子群优化算法的电动汽车制动控制策略研究
版权申诉
165 浏览量
更新于2024-06-19
收藏 5.24MB PDF 举报
本篇硕士学位论文深入探讨了电动汽车在面临环境污染与能源危机背景下的发展挑战,特别是如何通过机电复合制动能量回收技术来提升电动汽车的续驶里程。论文首先回顾了行车制动的历史,分析了线控液压制动系统的特点及其在电动汽车中的应用,强调了滑移率与路面附着系数之间的关联,这对于路面识别器的设计具有重要意义。
路面识别器是研究的核心部分,它通过模糊算法,实时监测车辆行驶时轮胎与路面的互动,计算出当前路面的附着系数。这种路面识别器有助于确保车辆在各种路面上的制动安全性和稳定性,最大化地利用地面附着力,特别是在制动过程中。
针对前后轴制动力的分配问题,论文提出了一种创新的制动力分配控制策略,结合经典控制方法的优点,兼顾制动能量回收和制动稳定性。通过粒子群优化算法,优化电机制动力的大小,使之能根据不同的制动强度自动调整,实现最佳制动模式的切换。这种方法旨在最大程度地回收制动能量,并通过仿真分析进行验证。
论文进一步通过Matlab/Simulink搭建了控制策略模型和Cruise中的整车模型,进行联合仿真,采用新欧洲道路循环工况(NEDC)和美国城市测试循环工况(FTP75)等典型场景,评估了设计策略的可行性和制动能量回收效果。此外,通过在不同制动模式下的实验,证明了所设计控制策略在制动效能方面的优势。
这篇论文不仅深入剖析了路面识别在制动控制中的作用,还展示了粒子群优化算法在电动汽车制动能量回收策略中的实际应用,以及其在复杂工况下的性能优化。这对于电动汽车行业的可持续发展和技术进步具有重要的参考价值。
盐城工学院硕士学位论文 1 绪论
8
调节电机制动力;最后在 Matlab/Simulink 中搭建控制策略模型,Cruise 中搭建车
辆动力学模型,进行联合仿真,在可行性、能量回收以及不同车速下制动三方面验
证本文所设计的优化后控制策略的制动安全稳定性以及能量回收效率。
现存在的
问题
制动能量
回收
制动稳定性
能量回收
和稳定性
不能兼顾
电机制动力
参与较低,
能量回收不
明显
制动力分配
不合理,车
轮容易抱死
行车制动系
统的发展
各制动系统
的优缺点
能量回收原
理
行驶状态和制
动状态下的动
力学分析
路面附着系
数与滑移率
的关系
路面识别器输
入参数的计算
滑移率和纵向利
用附着系数的模
糊化
根据与各种路面的
相似度计算路面峰
值附着系数
控制策略
的设计
总结经典制
动力分配控
制策略
分析制动力
分配约束
改进后的制
动力分配
粒子群优化算
法调节电机制
动力
模糊算法调整
电机制动力占
比
Cruise搭建
车辆动力学
模型
Simulink搭
建复合制动
控制策略
在可行性、能量回收、不同车
速下制动三方面进行验证
改善制动效能,提高车辆的制动能量回收
第一章
绪论
第二章
机电复
合制动
系统结
构设计
及动力
学分析
第三章
路面识
别器的
设计
第四章
电液复
合制动
控制策
略的设
计
第五章
仿真验证
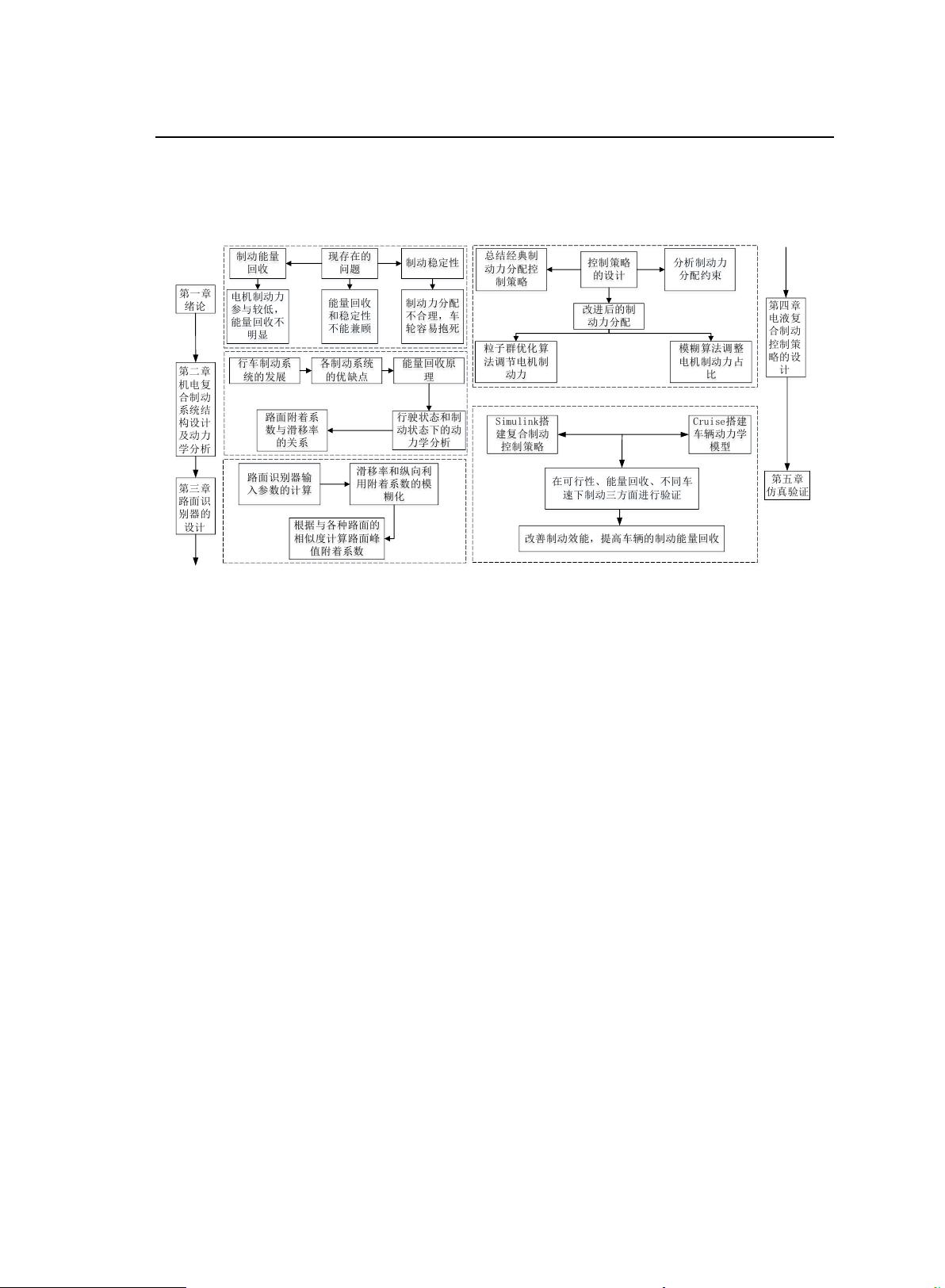
图 1.2 研究技术路线
Fig. 1.2 Research technical route
1.3.2 研究的主要内容
本文以前驱纯电动汽车为研究对象,针对纯电动汽车续驶里程低、车辆制动不
稳定的问题进行研究。设计了一种基于路面识别下的粒子群优化算法复合制动控
制策略。首先确定机电复合制动系统的结构,其次根据模糊算法综合考虑车辆的滑
移率与纵向利用附着系数设计一种识别峰值路面附着系数的路面识别器,确保制
动力的大小不会超过最大地面制动力,基于相关法规确定前后轴制动力分配范围
和制动力的分配,然后设计机电复合制动控制策略,采用两种控制算法对电机制动
力进行修正,最后在 Matlab/Simulink 和 Cruise 联合仿真的环境下对所设计的控制
策略进行验证,具体的研究内容如下:
第一章,首先对本课题的研究背景及意义进行了介绍。然后对纯电动汽车制动
能量回收和安全稳定性两方面的国内外研究现状进行了分析,并阐述了本文的主
要研究内容与技术路线。
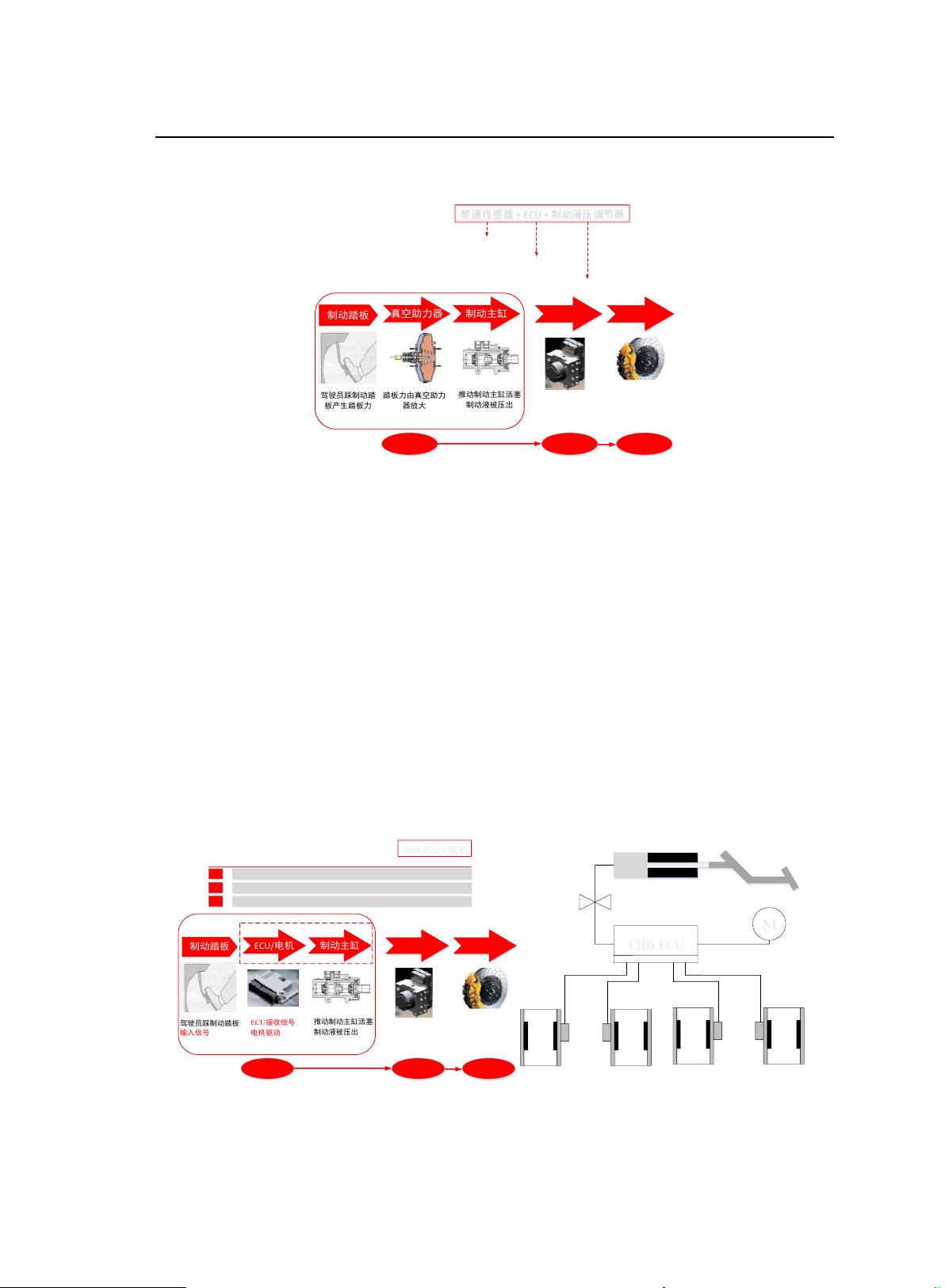
第二章,首先介绍了各种制动系统的制动过程以及相互之间的区别。然后基于
上述制动系统,提出了本文所要研究的机电复合制动系统结构。对回收原理进行了
阐述,并对车轮在行驶状态和制动状态进行受力分析。最后对路面附着系数和滑移
率进行分析,为复合制动控制策略的设计提供理论基础。
第三章,首先对模糊算法进行了简单的介绍。然后搭建基于模糊算法的路面识
别器,对路面识别器的输入参数进行了计算,并分析了各种路面纵向附着系数与滑


剩余75页未读,继续阅读
110 浏览量
204 浏览量
1686 浏览量
4632 浏览量
2091 浏览量
1912 浏览量
1686 浏览量
4126 浏览量


icwx_7550592
- 粉丝: 21
 我的内容管理
展开
我的内容管理
展开







最新资源
- ITween插件实用教程:路径运动与应用案例
- React三纤维动态渐变背景应用程序开发指南
- 使用Office组件实现WinForm下Word文档合并功能
- RS232串口驱动:Z-TEK转接头兼容性验证
- 昆仑通态MCGS西门子CP443-1以太网驱动详解
- 同步流密码实验研究报告与实现分析
- Android高级应用开发教程与实践案例解析
- 深入解读ISO-26262汽车电子功能安全国标版
- Udemy Rails课程实践:开发财务跟踪器应用
- BIG-IP LTM配置详解及虚拟服务器管理手册
- BB FlashBack Pro 2.7.6软件深度体验分享
- Java版Google Map Api调用样例程序演示
- 探索设计工具与材料弹性特性:模量与泊松比
- JAGS-PHP:一款PHP实现的Gemini协议服务器
- 自定义线性布局WidgetDemo简易教程
- 奥迪A5双门轿跑SolidWorks模型下载
