深入解析SIFT特征点提取算法
需积分: 0 170 浏览量
更新于2024-06-30
收藏 3.23MB PDF 举报
"SIFT特征点提取的详细解析与实现"
SIFT(Scale-Invariant Feature Transform,尺度不变特征变换)算法是计算机视觉领域中用于图像处理的一种经典算法,由David Lowe在1999年提出,并在2004年进行了完善。它的主要目标是检测和描述图像中的局部特征,这些特征在不同尺度、旋转、光照条件下保持不变,具有良好的鲁棒性和重复性。
1. **SIFT算法概述**
- **尺度不变**:SIFT算法首先在不同尺度的空间中寻找极值点,确保特征点能在图像缩放时仍然被检测到。
- **旋转不变**:通过计算描述符的主方向,SIFT能够捕获特征点的旋转信息,使得特征点在不同角度的图像中依然可识别。
- **稳定性**:SIFT特征对光照变化、噪声以及部分遮挡具有较高的容忍度,提高了在复杂环境下的识别效果。
2. **SIFT算法步骤**
- **尺度空间极值检测**:使用高斯差分金字塔确定不同尺度下的关键点。
- **关键点定位**:精确计算每个关键点的位置,消除噪声和边缘响应。
- **关键点尺度估计**:确定每个关键点的最优尺度参数。
- **关键点方向分配**:计算每个关键点的主方向,通常采用梯度直方图的方法。
- **描述符生成**:在关键点周围构建描述符向量,通常为128维,反映关键点附近的局部图像信息。
- **描述符归一化**:确保描述符在旋转和光照变化下的不变性。
3. **难点解析**
- **主方向计算**:这是SIFT算法中的一个重要环节,通过抛物线插值确定关键点的主方向,但具体实现往往较为复杂,需要理解梯度信息和抛物线拟合的过程。
- **描述符构造**:SIFT算法通过采样关键点周围的图像梯度来构建描述符,确保了特征的稳定性和唯一性。
4. **开源实现**:
- 开源库如OpenCV提供了SIFT算法的实现,方便开发者使用。文章中提到的robwhess的SIFTC代码提供了更详细的注释,有助于理解算法的内部工作原理。
5. **应用领域**
- **物体识别**:SIFT特征可以用于识别不同视角下的同一物体。
- **机器人导航**:在地图感知中,SIFT可以辅助机器人定位和路径规划。
- **图像拼接**:在图像拼接过程中,SIFT特征可以作为匹配的基础,确保不同图像的正确对齐。
- **3D建模**:通过匹配多个视角的SIFT特征,可以重建物体的3D模型。
- **动作识别**:在视频分析中,SIFT可以用于识别和追踪特定的动作。
SIFT算法虽然计算复杂度较高,但因其强大的稳定性和不变性,仍被广泛应用于各种视觉任务中。理解和掌握SIFT算法对于深入研究计算机视觉领域的特征检测和描述具有重要意义。
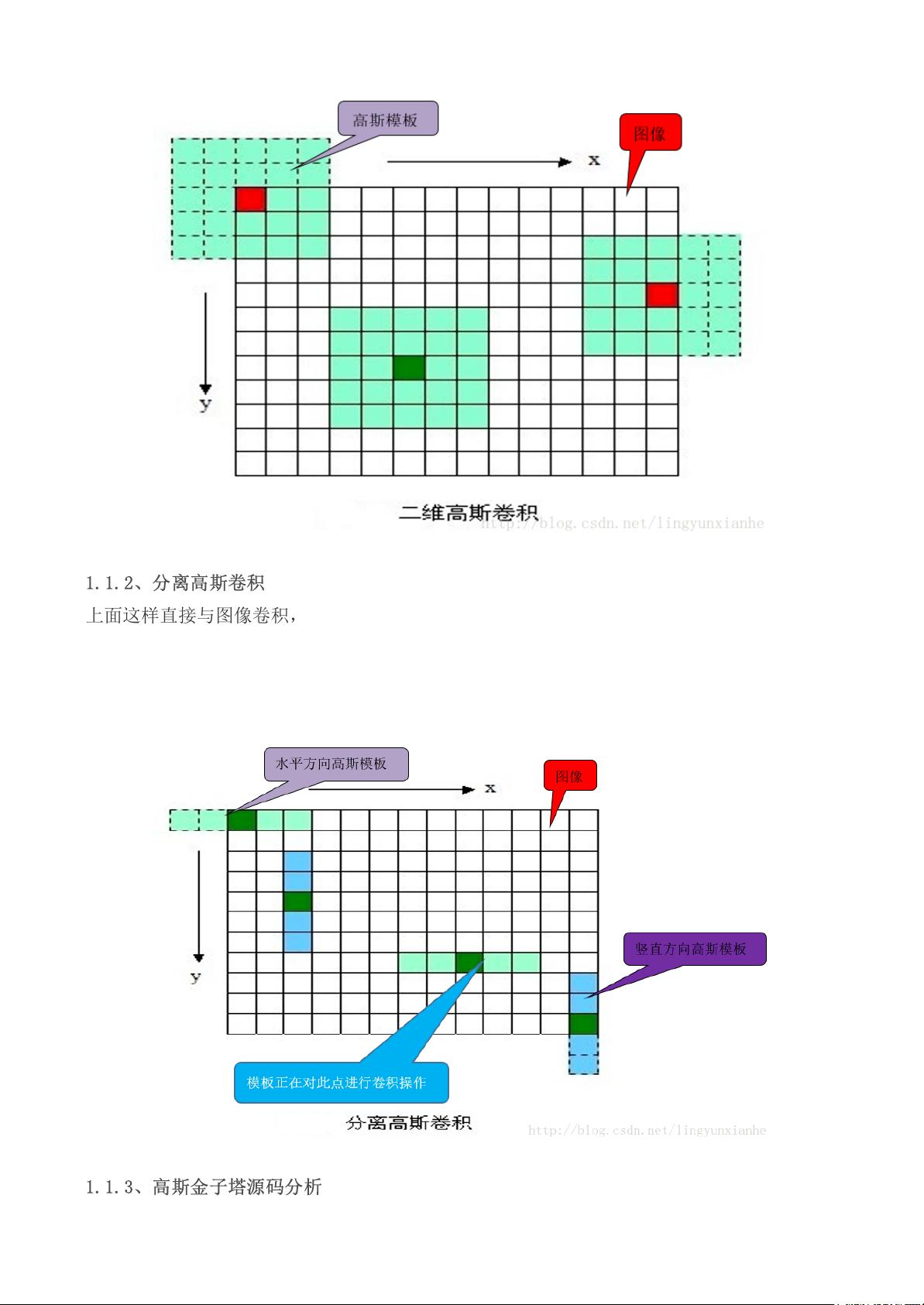
1.1.2
、
分
离
高
斯
卷
积
上面这样直接与图像卷积,速度比较慢,同时图像边缘信息也会损失严重。后来,后
来、、、,不知哪位学者发现,可以使用分离的高斯卷积(即先用1xN的模板沿着X方向对图
像卷积一次,然后用Nx1的模板沿着Y方向对图像再卷积一次,其中N=[(6σ+1)]且向上取最
邻近奇数),这样既省时也减小了直接卷积对图像边缘信息的严重损失。
1.1.3
、
高
斯
金
子
塔
源
码
分
析
剩余19页未读,继续阅读
2023-04-13 上传
2022-08-03 上传
2021-05-21 上传
2021-05-30 上传
2021-05-21 上传
2021-05-21 上传

基鑫阁
- 粉丝: 589
- 资源: 358
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
