主动后轮转向与转矩分配协调控制策略研究
需积分: 41 151 浏览量
更新于2024-08-12
收藏 3.37MB PDF 举报
"该研究主要探讨了主动后轮转向汽车与转矩分配的协调控制策略,旨在提升车辆的操纵稳定性。研究中,基于线性车辆模型设计了后轮转向控制器和车辆稳定控制器,并构建了一个包括驾驶员模型、七自由度车辆模型、后轮转向控制器和转矩分配在内的闭环控制系统。通过双移线仿真试验,与比例四轮转向车辆和前轮转向车辆的仿真结果对比,证明了所提出的协调控制策略在操纵稳定性和低附着路面表现上的优越性。"
主动后轮转向技术是近年来汽车工程领域的研究焦点,它允许后轮在一定范围内独立于前轮转向,从而改变车辆的动态特性。在这项研究中,研究人员设计了一种主动后轮转向控制器,该控制器能够根据车辆状态和驾驶员意图调整后轮转向角度,以改善车辆的转向响应和稳定性。
同时,车辆的稳定性控制是通过转矩分配来实现的。转矩分配是指通过对各个车轮施加不同的驱动力或制动力,以优化车辆在不同行驶条件下的动态性能。在本研究中,转矩分配与后轮转向协同工作,进一步增强了车辆的操纵稳定性和安全性。
研究人员建立了一个包含驾驶员模型的“人-车-路”闭环控制系统。驾驶员模型反映了人类驾驶员的行为和反应,七自由度车辆模型则考虑了车辆在横向、纵向和垂直三个维度上的运动,使得仿真更接近实际驾驶情况。通过双移线仿真试验,这种协调控制策略在高速变道等复杂驾驶场景下表现出色,尤其是在低附着路面上,能够保持车身的良好转向姿态,有效抑制侧滑,提高了车辆的稳定性。
相比传统的前轮转向或比例四轮转向系统,主动后轮转向与转矩分配的协调控制策略具有更优的性能。它能够更精细地调整车辆的动态特性,适应各种路况变化,对于提升现代汽车尤其是高性能车辆的安全性和驾驶体验具有重要意义。此外,该研究还指出,通过参数自适应调节可以适应路面附着条件的变化,进一步提升了控制策略的适应性和鲁棒性。
这项研究为提升汽车操纵稳定性和驾驶安全提供了一种创新的控制方法,其成果对于未来汽车设计和控制系统的优化具有重要的理论指导和实践价值。
【130】 第42卷 第9期 2020-09
主动后轮转向汽车
与转矩分配协调控制研究
Cooperative control of active rear wheel steering
vehicle and torque distribution
元加加
,
韩 伟
,
赵沛竹
YUAN Jia-jia, HAN Wei, ZHAO Pei-zhu
(
江西理工大学 机电工程学院
,
赣州 341000
)
摘 要:
为改善车辆操纵稳定性,基于线性车辆模型设计后轮转向控制器及车辆稳定控制器,提出一种
主动后轮转向与转矩分配协调控制策略。搭建由驾驶员模型、七自由度车辆模型、后轮转向
控制器及转矩分配等模块组成的“人-车-路”闭环控制系统,开展双移线仿真试验,并与同
参数比例四轮转向车辆及前轮转向车辆仿真结果对比。结果表明:所提出的主动后轮转向与
转矩分配协调控制控制效果最佳。在低附着路面表现更为明显,不仅使车身始终保持较好转
向姿态,还有效改善了车辆的稳定性。
关键词:
主动后轮转向;协调控制;闭环系统;操纵稳定性
中图分类号:
U461.6
文献标识码
:A
文章编号:
1009-0134(2020)09-0130-05
收稿日期:2019-07-25
基金项目:
江西理工大学研究生创新专项资金项目
(
ZS2018-S107
)
作者简介:
元加加
(
1993
-
),
男
,
硕士
,
研究方向为电动汽车动力学控制
。
0 引言
转向系统作为汽车底盘重要组成部分,提高汽车
转向特性对改善车辆操纵稳定性具有十分重要的作用,
为此,研究人员提出了一些主动转向技术来实现上述目
标。目前采用四轮转向系统来改善汽车操纵稳定性已成
为了研究热点
[1]
。如Hirche等
[2]
运用模糊控制对主动后
轮转向车辆的操纵稳定性进行研究,但制定模糊规则主
要依赖设计者经验。杜峰等
[3]
基于前后反馈设计线性二
次型主动后轮转向控制器,分析半正定矩阵中权重系数
对控制器性能的影响。考虑路面附着变化对控制器的影
响,谢宪毅等
[4]
引入变权重系数实现参数自适应调节,
来提升最优控制器的性能及适用范围。Zhang等
[5]
为提
高车辆的横摆稳定性,设计一种新型脉冲主动后轮转向
系统,经仿真表明能显著提高车辆的横摆稳定性。邱浩
等
[6]
设计主动后轮转向滑模控制器来跟踪理想横摆角速
度,忽略了质心侧偏角也会受后轮转角影响。针对单一
将横摆角速度作为控制变量,Wagner等
[7]
设计一种基于
主动后轮转向的新型结构,来避免剧烈反向转向时车辆
可能出现运动姿态恶化的状况。
为兼顾考虑两者对车辆状态的影响,基于线性车辆
模型,以横摆角速度和质心侧偏角为控制变量,采用滑
模控制理论设计后轮转向控制器及车辆稳定控制器,提
出一种主动后轮转向与转矩分配协调控制来提升车辆的
操纵稳定性。为使模型验证更具实际意义,在高/低附
着路面分别进行闭环双移线仿真验证。
1 车辆横向动力学模型
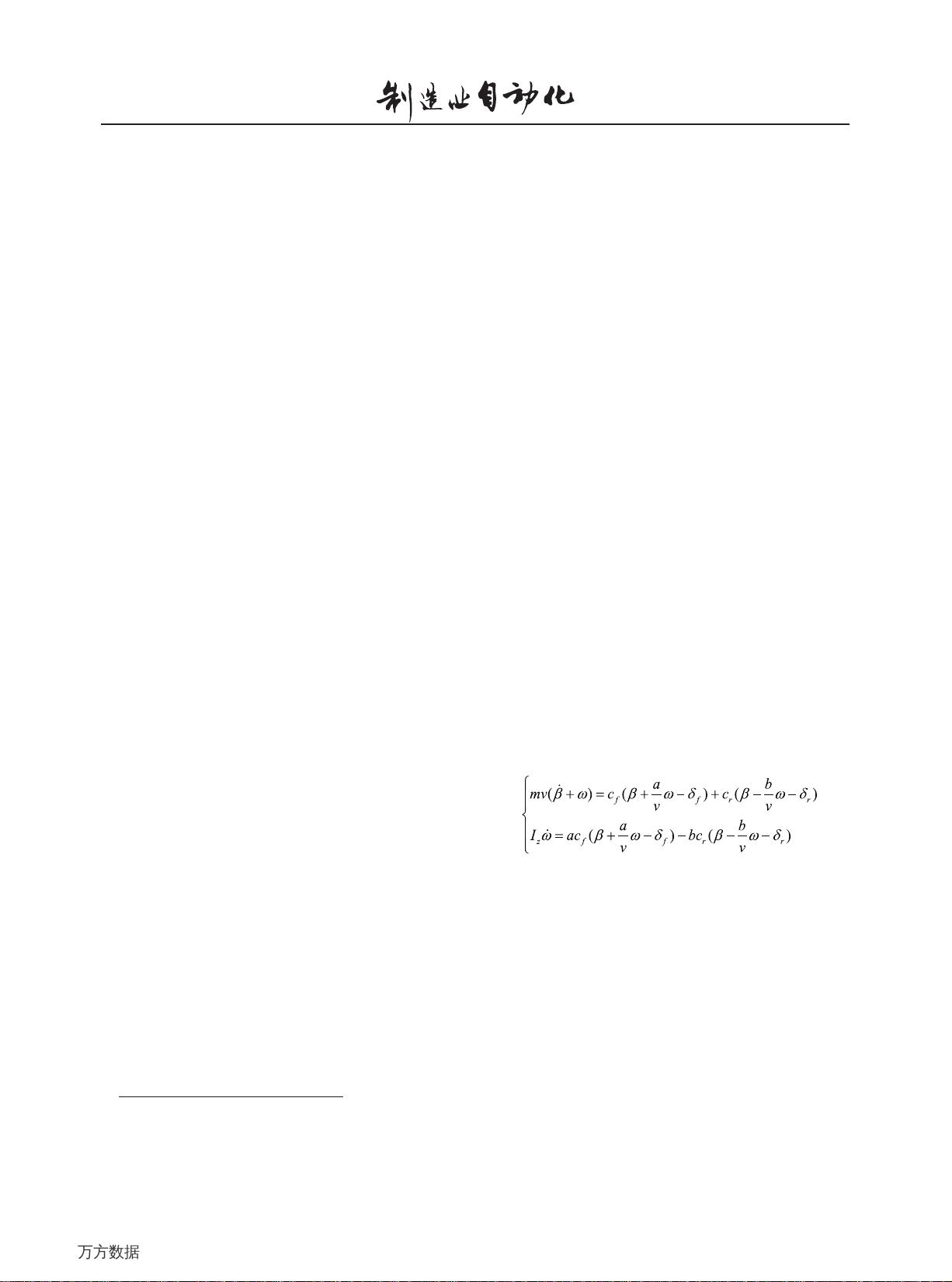
为更好地研究独立驱动电动汽车的横向动力学,采
用简化只有横向和横摆方向上运动的线性2自由度车辆
模型。依据牛顿第二定律,建立其微分方程:
(1)
式中:m为整车质量;β为车辆质心侧偏角;ω为
横摆角速度;v为质心纵向速度分量;I
z
为绕质心的横
摆转动惯量;c
f
,c
r
分别为前后轮等效侧偏刚度;a,b
分别为质心至前后轴距离;δ
f
,δ
r
分别为汽车前后轮
转角。
将前轮转向车辆稳态横摆角速度作为理想横摆角
速度。由于车辆的横向加速度无法超过由地面所能提供
的最大横向加速度,同时考虑到瞬态响应过程存在纯
万方数据
下载后可阅读完整内容,剩余4页未读,立即下载
2021-09-04 上传
2021-08-08 上传
2021-09-05 上传
2021-08-08 上传
2021-09-04 上传
2021-09-04 上传
2021-08-09 上传
2021-09-04 上传
2021-08-31 上传

weixin_43796045
- 粉丝: 120
- 资源: 53
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
