A*算法详解:从入门到实践
需积分: 10 45 浏览量
更新于2024-09-13
收藏 155KB DOC 举报
"A*算法入门"
A*(A-star)算法是一种广泛应用的路径搜索算法,尤其在游戏开发、图形学和导航系统中极为常见。它结合了最佳优先搜索(Dijkstra's algorithm)和启发式搜索的优点,能够在保证找到最优路径的同时,有效地减少计算量。
在A*算法中,我们首先需要将问题空间划分为可通行和不可通行的节点,通常以网格形式呈现。每个节点代表地图上的一个位置,节点之间通过边相连,边的权重通常代表移动成本,如距离或时间。在图一的例子中,绿色节点是起点A,红色节点是终点B,蓝色节点表示障碍物。
A*算法的核心在于评估每个节点的“f”值,它由两部分组成:g值和h值。g值是从起点到当前节点的实际代价,h值是从当前节点到目标的预计代价。f值的计算公式为 f(n) = g(n) + h(n)。这里的h(n)通常使用启发式函数来估算,比如曼哈顿距离或欧几里得距离,但必须保证启发式函数是“一致的”或“admissible”,即对于所有节点n,h(n) ≤ d(n, goal),其中d(n, goal)是实际从n到目标的最小代价。
算法的搜索过程遵循以下步骤:
1. 初始化开放列表和关闭列表。开放列表存放待评估的节点,关闭列表存放已评估过的节点。
2. 将起点A添加到开放列表中,g(A)设为0,h(A)根据启发式函数计算,f(A) = g(A) + h(A)。
3. 当开放列表非空时,选择f值最低的节点(通常是g值和h值之和最小的节点)作为当前节点。
4. 检查当前节点是否为目标节点。如果是,找到最优路径,算法结束。
5. 如果当前节点不是目标节点,将其从开放列表移到关闭列表,然后遍历其未被关闭的邻居节点。
6. 对每个邻居节点,计算其新的g值(从起点到邻居节点的实际代价,可能通过当前节点),并更新h值。如果邻居节点不在开放列表中,就添加进去;如果已经在开放列表中且新计算的g值更低,则更新其g值和f值。
7. 返回步骤3,重复此过程,直到找到目标节点或开放列表为空(表示无解)。
A*算法之所以效率高,是因为它利用启发式信息来优先考虑更有可能导向目标的节点,从而减少了探索的节点数量。然而,要注意的是,启发式函数的选择和实现直接影响算法的性能和结果的准确性。
在实际应用中,A*算法可以被编写成各种编程语言的实现,文中提到的示例程序包提供了C++和Blitz Basic两种语言的代码,帮助初学者理解算法的运作机制。通过运行示例程序,你可以直观地观察算法如何在不同场景下找到最优路径。
A*算法是一种强大的路径搜索工具,其核心在于f值的计算和启发式函数的应用。理解并掌握A*算法,不仅有助于解决实际问题,还能为深入学习其他高级路径规划算法打下坚实基础。
当我们把搜索区域简化成一些很容易操作的节点后,下一步就要构造一个搜索来寻找最短路径 。
在 A*算法中,我们从 A 点开始,依次检查它的相邻节点,然后照此继续并向外扩展直到找到目
的地。
我们通过以下方法来开始搜索:
1. 从 A 点开始,将 A 点加入一个专门存放待检验的方格的“开放列表”中。这个开放列表有点
像一张购物清单。当前这个列表中只有一个元素,但一会儿将会有更多。列表中包含的方格可
能会是你要途经的方格,也可能不是。总之,这是一个包含待检验方格的列表。
2. 检查起点 A 相邻的所有可达的或者可通过的方格,不用管墙啊,水啊,或者其他什么无效
地形,把它们也都加到开放列表中。对于每一个相邻方格,将点 A 保存为它们的“父方格”。当
我们要回溯路径的时候,父方格是一个很重要的元素。稍后我们将详细解释它。
3. 从开放列表中去掉方格 A,并把 A 加入到一个“封闭列表”中。封闭列表存放的是你现在不
用再去考虑的方格。
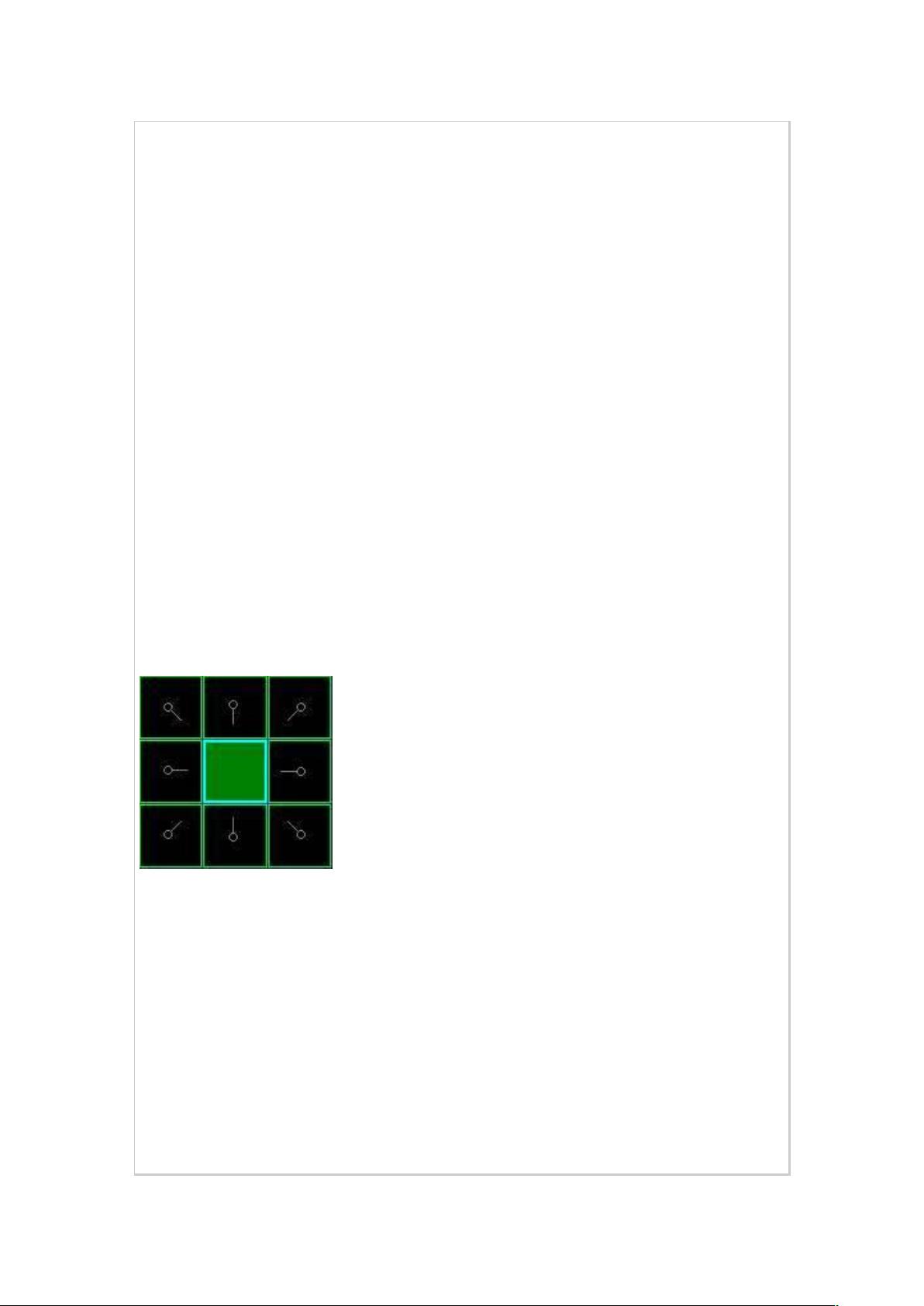
此时你将得到如下图所示的样子。在这张图中,中间深绿色的方格是你的起始方格,所有相邻
方格目前都在开放列表中,并且以亮绿色描边。每个相邻方格有一个灰色的指针指向它们的父
方格,即起始方格。
[图二]
接下来,我们在开放列表中选一个相邻方格并再重复几次如前所述的过程。但是我们该选哪一
个方格呢?具有最小 F 值的那个。
"
路径排序
剩余10页未读,继续阅读
2010-03-02 上传
2009-04-07 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

babyface086
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- o2o优惠券sets-数据集
- jetty-cloud:用于Cloudfoundry部署的示例嵌入式码头项目
- AdSense Integrator-开源
- java代码-20软三35号 用Java实现如下的骰子游戏: 丢下两个骰子,若总值为7点,则赢,否则输。
- reviewing-a-pull-request
- 马赛克瓷砖选色问题 .rar
- fuzzy-highway-bottleneck-python:基于Python的代码使用速度转换矩阵估算高速公路瓶颈概率
- navicat免安装.zip
- Tasklist Doclet-开源
- MultiSync:Java的MultiSync库。 MultiSync可帮助开发人员快速编写云存储解决方案。 从一百万个箍到处理从OAuth到上载和下载文件的所有事务,再也没有
- Questor:探索者
- 快乐的地方
- SendMsg.rar
- c代码-这是一个统计出0-30之间素数的程序。
- Software Studio-开源
- proyecto-estudiando2021:Proyecto creado en clase
