低功耗超宽带UWB雷达传感器技术解析
"Nuno Paulino, Joao Goes, Adolfo Steiger Garcao的《Low Power UWB CMOS Radar Sensors》是Springer出版社在2008年出版的一本书,该书属于Analog Circuits and Signal Processing Series,由Mohammed Ismail担任咨询编辑。这本书详细探讨了低功耗超宽带UWB(Ultra-Wideband)雷达传感器的设计与应用,旨在提供有关UWB雷达射频微波技术的专业知识。"
《Low Power UWB CMOS Radar Sensors》这本书聚焦于利用互补金属氧化物半导体(CMOS)技术设计的低功耗超宽带雷达传感器。UWB雷达是一种使用极短脉冲或宽带信号进行探测的技术,它在无线通信、目标定位、生物医学成像、室内导航等领域有着广泛的应用。由于其具有高分辨率、抗多径干扰和低功耗的特性,UWB雷达传感器在近年来受到了越来越多的关注。
书中可能涵盖了以下几个关键知识点:
1. **UWB雷达原理**:解释了UWB雷达的工作机制,包括脉冲雷达、连续波雷达等不同工作模式,以及如何通过超宽带信号实现高时间分辨率和距离分辨率。
2. **CMOS技术**:讨论了采用CMOS工艺制作雷达传感器的优势,如成本效益高、集成度高、功耗低等,并可能探讨了CMOS工艺对UWB雷达性能的影响。
3. **低功耗设计**:详细介绍了降低雷达传感器功耗的各种策略,包括电路优化、功率管理技术和能效比的提升方法。
4. **射频微波电路**:涵盖了用于UWB雷达的射频前端设计,如混频器、放大器、滤波器等,以及它们在系统中的作用和挑战。
5. **信号处理**:阐述了UWB雷达信号的处理技术,如脉冲压缩、多普勒分析和目标检测算法,以及这些技术如何提高雷达系统的性能。
6. **应用案例**:可能包含了一些实际应用示例,如无线通信、环境监测、人体健康监测等,展示了UWB雷达传感器的多样化应用场景。
7. **系统集成**:讨论了将所有组件集成到单个芯片上的挑战和解决方案,包括布局布线、噪声管理和互连设计。
这本书不仅适合电子工程专业的学生和研究人员,也对那些希望深入了解UWB雷达传感器设计和应用的工程师和技术人员非常有价值。通过深入学习,读者可以掌握如何利用CMOS技术开发出低功耗、高性能的UWB雷达传感器。
8 2 UWB Signals and Systems
V
in
CLK
V
out
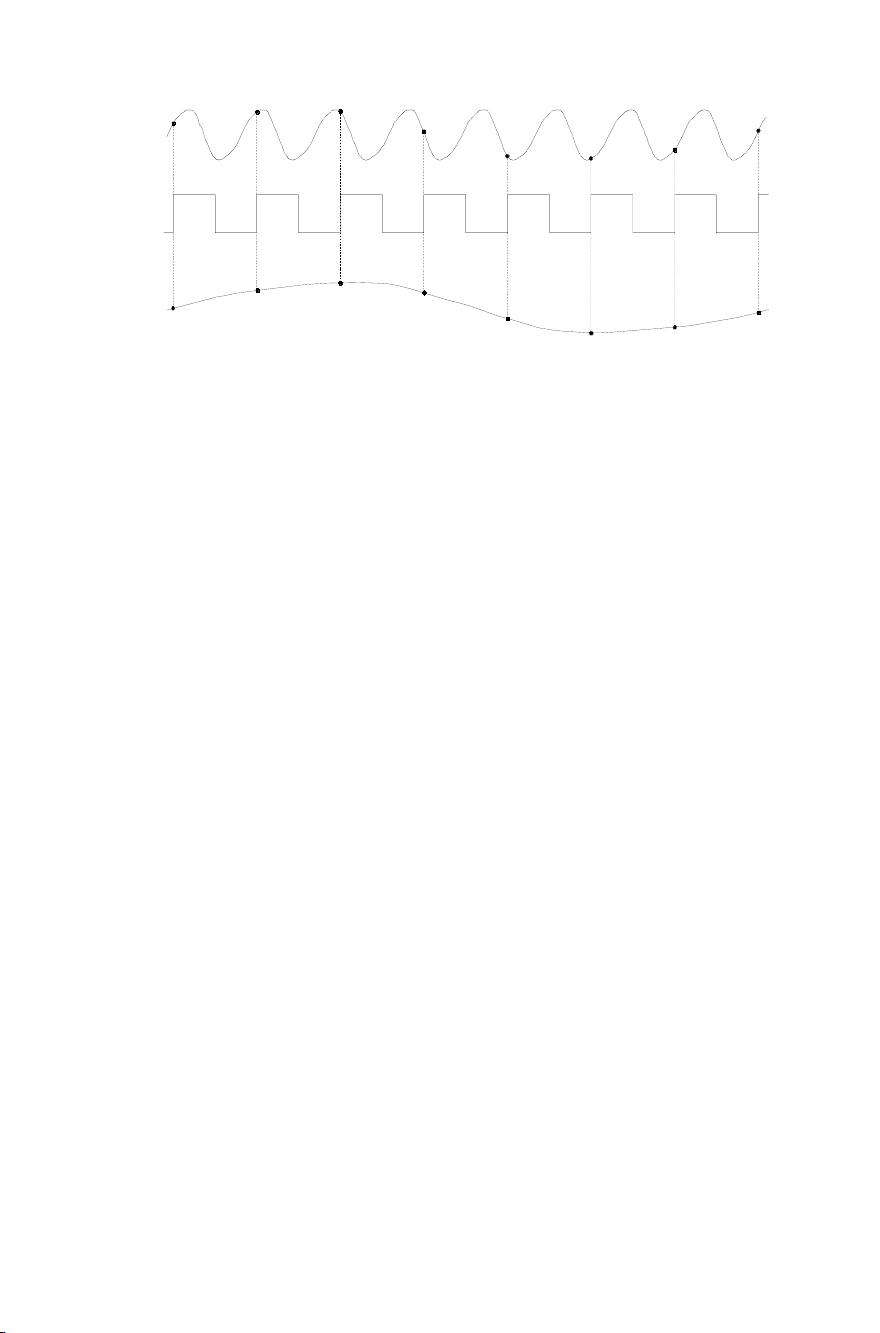
Fig. 2.2 Sub-Sampling of a repetitive fast input signal in order to produce a slow output signal
with the same shape as the fast input signal
Using pulses with very short duration it is possible to measure the impulse re-
sponse (through a sampling oscilloscope) of a distributed microwave network and
then calculate the frequency response using the Fourier transform. The maximum
and minimum frequency values of the analysis are determined by the pulse width
(the shorter the pulse the higher the maximum frequency value of the analysis)
and by the duration of the observation time (the longer the observation time the
lower the minimum frequency value of the analysis). Of course that increasing the
maximum and the minimum frequency of the analysis requires both a fast sam-
pling frequency in the oscilloscope and a large number of sampled points of the
impulse response. This procedure reduced the time needed to measure the fre-
quency domain properties of radar stealthy materials by a factor of 100 [8]. The
traditional method consists in applying a sine-wave signal, measuring the S pa-
rameters and then repeating the procedure for the different frequencies of interest.
This is the method of choice for narrow band systems. But for wide band systems,
such as today's digital systems (Rambus, USB 2.0, Firewire and others), it is diffi-
cult to interpret the measured frequency response and understand where the dis-
continuities in the transmission lines are physically located. TDR provides a more
intuitive and direct look into the signal integrity in digital systems [11], [12]. By
using a step generator to generate a fast edge into the transmission line and using a
sampling oscilloscope to monitor the reflected waves at different points in the line
it is possible to locate the line discontinuities and understand the nature (resistive,
inductive or capacitive) of each discontinuity. It is also possible to understand
whether losses in a transmission system (a circuit board trace, a cable, a connector
and so on) are series losses or shunt losses.
TDR has also been used to locate various defects in electrical power distribu-
tion cables (such as: voids, shield protrusions, contaminants, etc.) by locating par-
tial discharge events in the cable [13], [14]. The cable under test, terminated with
an open end, is connected to an excitation voltage source at the other end. This
voltage is gradually increased until a partial discharge (PD) event occurs at a cer-
tain point in the cable; the pulses generated by the PD event travel in the cable and
are reflected by the ends of the cable until they disappear because of the cable



剩余238页未读,继续阅读
345 浏览量
2021-03-29 上传
2020-11-21 上传
298 浏览量
2021-05-18 上传
121 浏览量
164 浏览量
147 浏览量
2021-09-04 上传

rainwatercn
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- AVR单片机C语言编程实战教程
- MATLAB实现π/4-QDPSK调制解调技术解析
- Rust开发微控制器USB设备端实验性框架介绍
- Report Builder 12.03汉化文件使用指南
- RG100E-AA U盘启动配置文件设置指南
- ASP客户关系管理系统的联系人报表功能解析
- DSPACK2.34:Delphi7控件的测试与应用
- Maven Web工程模板 nb-parent 评测
- ld-navigation:革新Web路由的数据驱动导航组件
- Helvetica Neue字体全系列免费下载指南
- stylelint插件:强化CSS属性值规则,提升代码规范性
- 掌握HTML5 & CSS3设计与开发的关键英文指南
- 开发仿Siri中文语音助理的Android源码解析
- Excel期末考试复习与习题集
- React自定义元素工具支持增强:react-ce-ubigeo示例
- MATLAB实现FIR数字滤波器程序及MFC界面应用
