EFORT机器人C10系统编程与安全操作指南
"该资源是埃夫特智能装备股份有限公司提供的EFORT机器人C10系统的编程手册,旨在帮助用户理解和操作这款机器人。手册详细介绍了安全预防措施、示教器硬件和软件界面,以及一系列指令的详细解释,包括运动指令和设置指令。版本号为V4.0,适用于所有关心埃夫特机器人编程和操作的用户。"
在《埃夫特机器人操作手册、编程手册》中,首先强调了基本安全预防措施,这是操作机器人前必须了解和遵循的重要准则。安全责任明确指出每个操作员都应对机器人的安全运行负责,而安全预防措施包括目的、定义和适用范围,确保用户在操作过程中能避免潜在危险。
手册的第二章详细介绍了示教器硬件,包括其外观设计(前视图、后视图、侧视图)以及各种操作按键的功能,这使得用户能够熟悉和掌握对示教器的基本操作。
第三章则详细解析了示教器的软件界面,涵盖了系统设置、权限登录、用户管理、版本信息、信息显示、网络设置等多个方面,这些功能对于用户进行编程和故障排查至关重要。此外,还详述了菜单键的使用,如输入输出监测、变量监控、位置控制、项目管理、执行控制、程序编辑、报警信息查看和报告生成等功能,帮助用户全面理解如何通过示教器进行机器人操作和监控。
第四章是手册的核心部分,深入解析了各种指令,包括运动指令(如PTP、Lin、Circ、PTPRel、LinRel等)和归原点指令,以及设置指令(如Dyn、Dynovr、ovl、Ramp、Refsys、ExternalTCP、Tool、OriMode等)。这些指令的详解有助于用户编写精确的机器人运动程序,实现高效、安全的自动化作业。
这份编程手册是埃夫特机器人用户的重要参考资料,不仅提供了基础操作指南,还详细阐述了高级功能,为用户熟练掌握和有效利用机器人提供了全面的支持。
EFORT 机器人 C10 系统编程手册
6
第二章示教器硬件
2.1
示教器介绍
C10 系列机器人控制单元示教器(ketop)可用于控制机器人运动,可创建、修改及
删除程序以及变量,可提供系统控制和监控功能,也包括安全装置(启用装置和紧急停
止按钮)。此示教器,适用于左手使用。
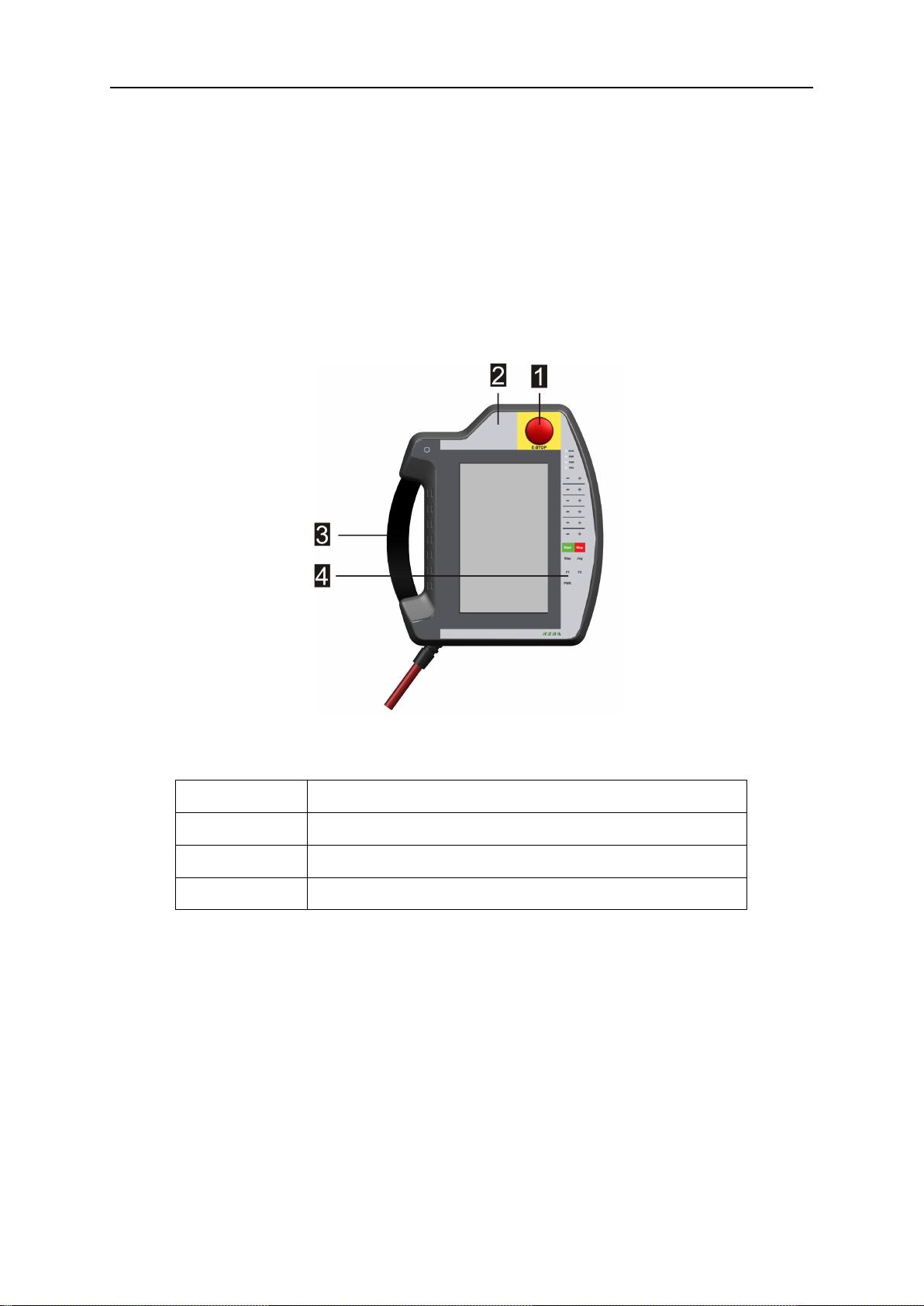
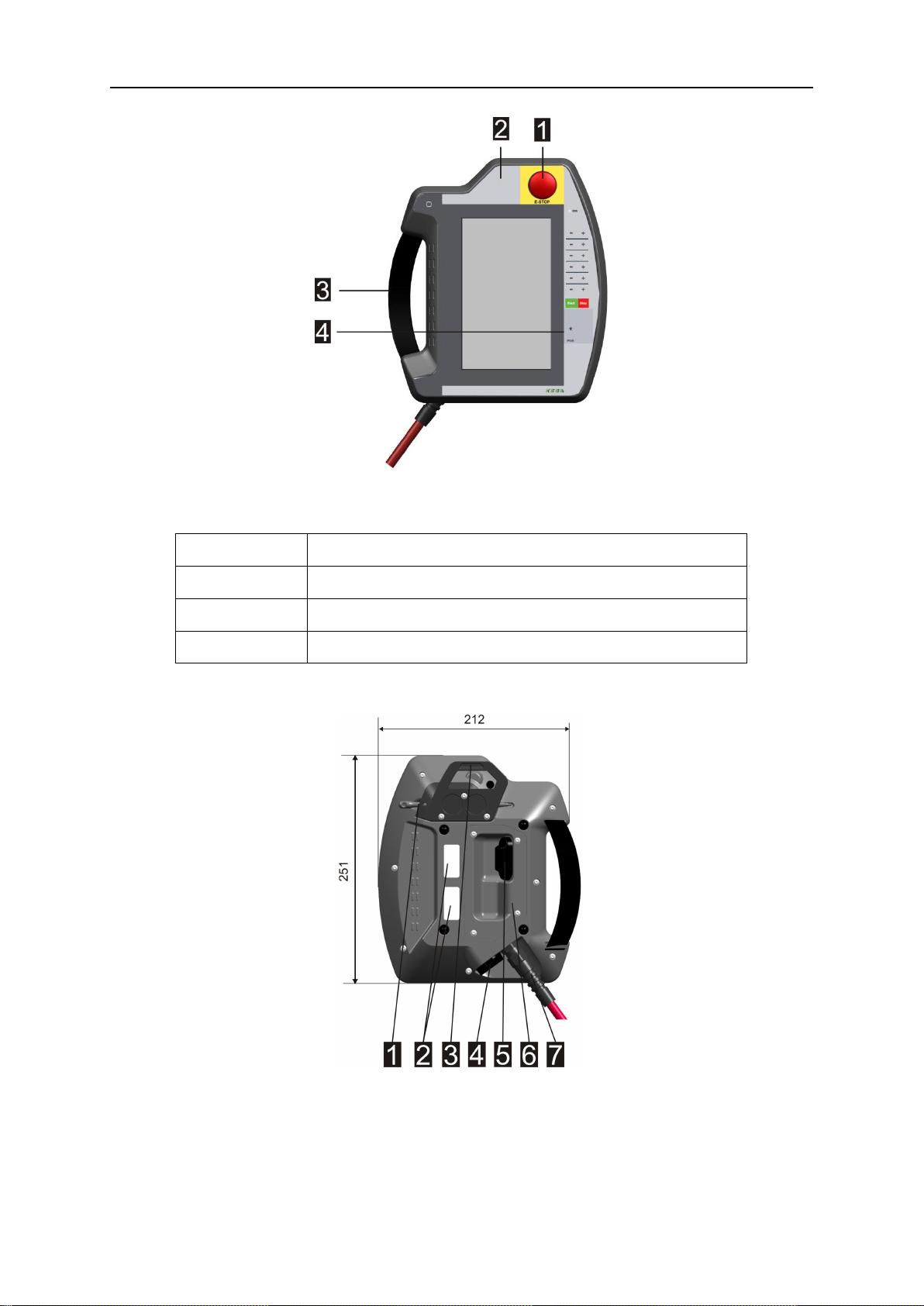
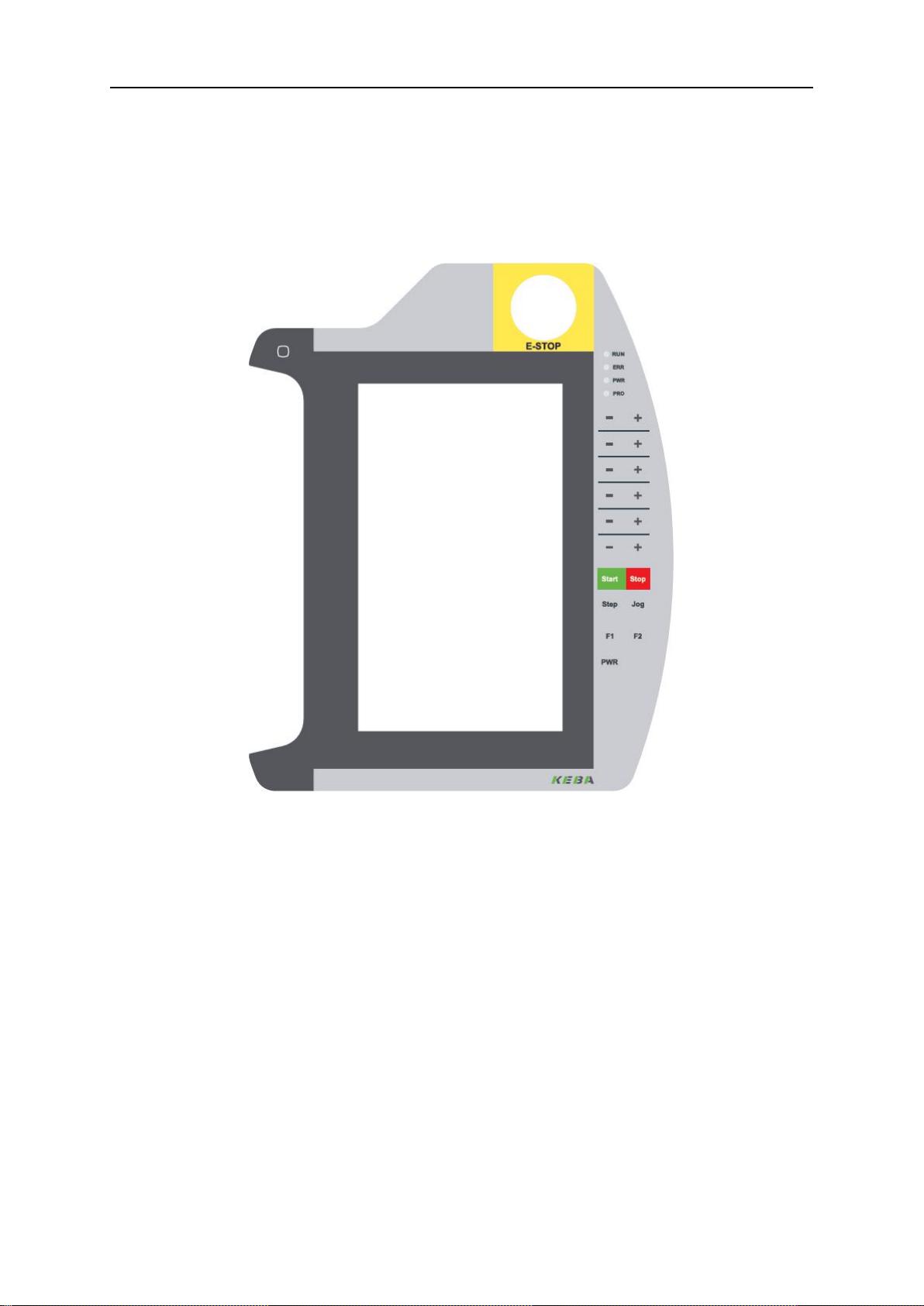
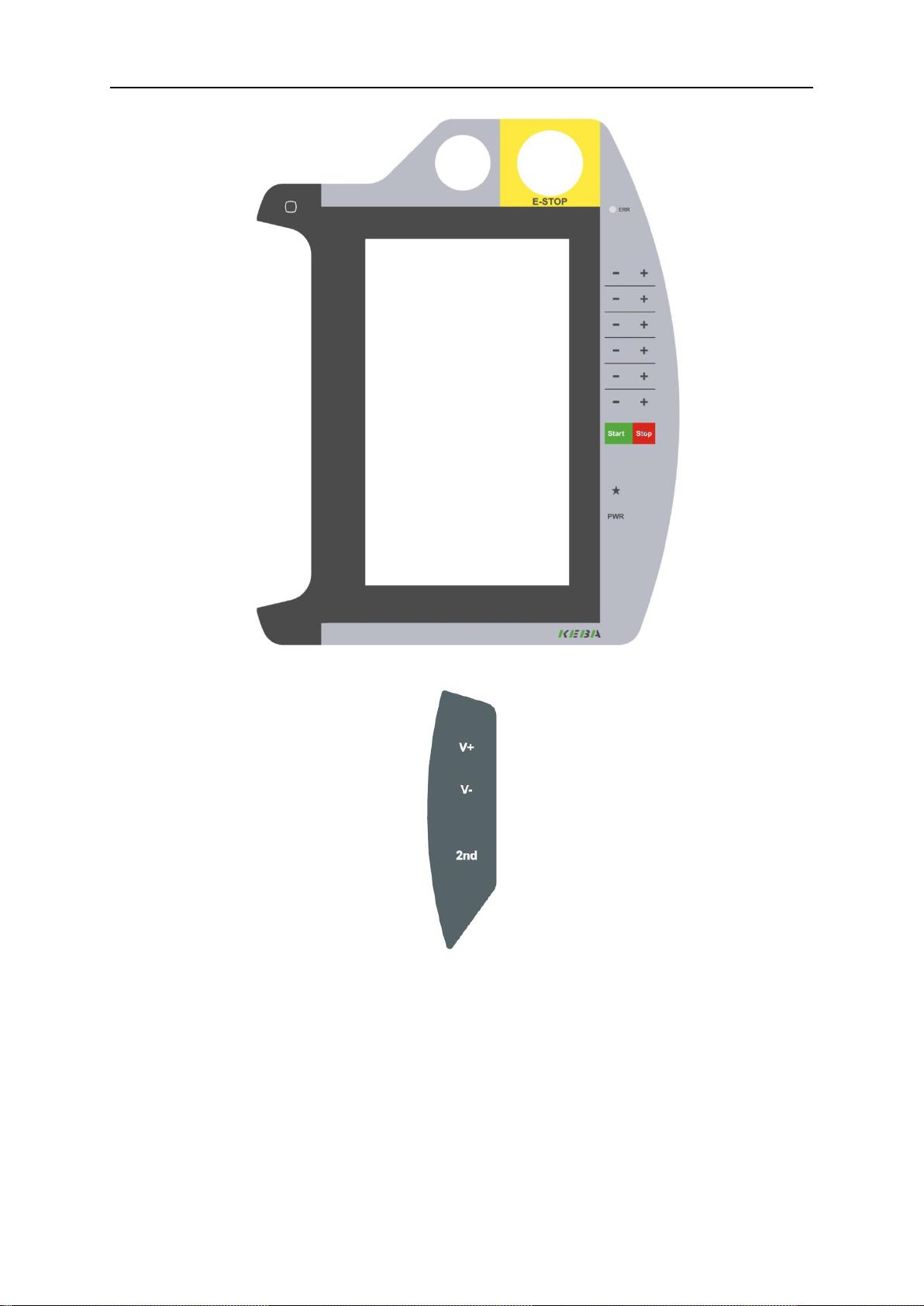
2.2 前视图
图 2.1 示教盒前视图(T70r)
表 2-1 示教盒前视图布局
1
急停按钮
2
模式选择开关(手动、自动、远程)
3
手带
4
按键
剩余227页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-02-21 上传
2021-06-12 上传
2023-02-25 上传
2020-09-11 上传
点击了解资源详情
点击了解资源详情

zongran_ruci
- 粉丝: 7
- 资源: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
