Python与VTK构建机械臂三维可视化
版权申诉
"本文主要探讨如何使用VTK与Python实现机械臂的三维模型可视化,适合对机械臂控制和可视化有兴趣的开发者参考。"
在机械臂的三维可视化领域,使用高级图形库如VTK (Visualization Toolkit) 可以极大地简化开发流程,降低编程复杂度。相比传统的基于OpenGL的底层编程,VTK提供了更丰富的功能和更高的抽象层次,使得开发者能够快速构建复杂的三维显示系统。Python作为流行的编程语言,因其简洁易用的语法和丰富的库支持,成为与VTK结合的理想选择。
上位机监控界面的构建通常包含多个模块,例如三维显示模块、机器人状态监测模块、通信模块和控制模块。其中,三维显示模块是关键,它不仅能够实时展示机械臂的姿态变化,还允许用户通过交互操作来控制机械臂的运动,实现直观的人机交互。例如,用户可以在三维视图中选择并拖动机械臂的某个关节,真实机械臂将模仿这种运动。
为了创建逼真的机械臂模型,可以利用专业的三维建模软件,如SolidWorks、Blender等,设计并组装各个部件,然后导出为通用的三维文件格式,如STL( Stereolithography)。在SolidWorks中,为了便于后期的定位和操作,需要在关键部位(如关节中心)设置自定义坐标系。此外,为了实现机械臂各部分的独立运动,每个可动部件都应该单独导出为STL文件。
导出STL文件时,应留意设置,确保每个部件的坐标和大小正确无误,以便在VTK中加载后能准确地进行定位和动画处理。在SolidWorks的STL输出选项中,应避免将所有部件合并为单个文件,因为这将限制在VTK中对各部件的独立控制。
在Python中,可以使用VTK库的相应模块读取这些STL文件,并进行渲染和动画处理。VTK提供了强大的数据结构和过滤器,能够处理模型的导入、渲染、变换和交互。通过编程,可以实现机械臂模型的动态更新,反映实际设备的状态变化,同时实现用户对模型的交互控制。
结合VTK和Python,开发者能够高效地构建机械臂的三维可视化系统,实现对机械臂的实时监控和灵活控制。这一方法不仅适用于教学、研究,也在工业应用中具有广泛的潜力。通过不断学习和完善,开发者可以进一步优化系统性能,增加更多高级功能,如碰撞检测、路径规划等,提升整个系统的实用性和用户体验。
VTK与与Python实现机械臂三维模型可视化详解实现机械臂三维模型可视化详解
主要介绍了VTK与Python实现机械臂三维模型可视化详解,具有一定借鉴价值,需要的朋友可以参考下。
三维可视化系统的建立依赖于三维图形平台, 如 OpenGL、VTK、OGRE、OSG等, 传统的方法多采用OpenGL进行底层编
程,即对其特有的函数进行定量操作, 需要开发人员熟悉相关函数, 从而造成了开发难度大、 周期长等问题。VTK、
ORGE、OSG等平台使用封装更好的函数简化了开发过程。下面将使用Python与VTK进行机器人上位机监控界面的快速原型
开发。
完整的上位机程序需要有三维显示模块、机器人信息监测模块(位置/角度/速度/电量/温度/错误信息...)、通信模块(串
口/USB/WIFI/蓝牙...)、控制模块等功能模块。三维显示模块主要用于实时显示机器人的姿态(或位置)信息。比如机器人上
肢手臂抬起,程序界面中的虚拟机器人也会同时进行同样的动作。三维显示模块也可以用于对机器人进行控制,实现良好的人
机交互。比如在三维图像界面中可以点击拾取机器人某一关节,拖拽部件(肢体)控制真实的机器人完成同样的运动。
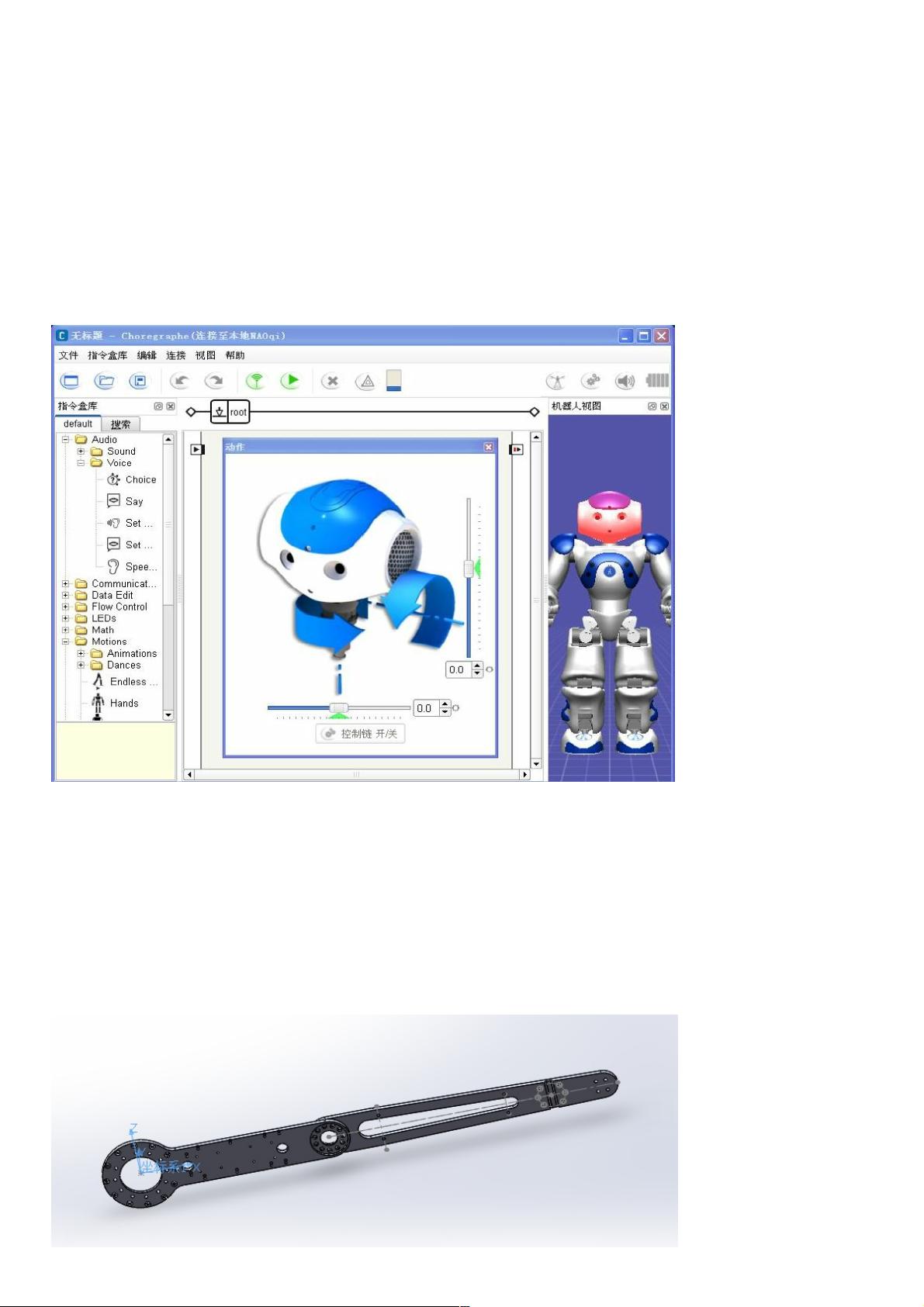
Aldebaran Robotics的图形化编程软件Choregraphe可以完成上述的一些功能对NAO机器人进行控制。
对于简单的模型可以自己编写函数进行创建,但这种方法做出来的模型过于简单不够逼真。因此可以先在SolidWorks、
Blender、3DMax、Maya、Rhino等三维设计软件中建立好模型,然后导出为通用的三维文件格式,再使用VTK将其读入并进
行渲染。
在SolidWorks等三维设计软件中设计好机器人的大臂(upperarm)和小臂(forearm),然后创建装配体如下图所示。在
将装配体导出为STL文件前需要注意几点:
1. 当从外界读入STL类型的模型时,其会按照它内部的坐标位置进行显示,因此它的位置和大小是确定的。为了以后的定
位以及移动、旋转等操作的方便,需要先在SolidWorks中创建一个坐标系。如下图所示,坐标系建立在大臂关节中心点。
2. 如果将装配体整体输出为一个STL文件,则导入VTK后无法控制零部件进行相对运动。因此,需要将装配体各可动部件
分别导出。
下载后可阅读完整内容,剩余5页未读,立即下载
2020-09-21 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38749863
- 粉丝: 3
- 资源: 913
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
