出租车司机乘客推荐系统:基于GPS轨迹的高效匹配策略
需积分: 10 82 浏览量
更新于2024-09-10
收藏 2.48MB PDF 举报
本文主要探讨的是"A Recommender System for Finding Passengers and Vacant Taxis",一种针对出租车司机和乘客需求的推荐系统。该系统利用出租车GPS轨迹数据,深入分析乘客的移动模式和司机的接客/送客行为,旨在提高服务效率并优化收益。
首先,该推荐系统为出租车司机提供一系列可能的目的地,这些地方更有可能快速接到乘客,尤其是在行程中或者目的地附近。系统通过学习大量出租车的GPS轨迹数据,推算出不同地点对于司机来说接客概率较高的规律,从而生成个性化的建议,帮助司机规划更有效的路线,增加下一次出行的盈利机会。
其次,对于寻找空车的乘客,系统同样提供推荐功能。它会推荐在步行距离内、容易找到空车的位置,基于司机的实际需求时间点,结合学习到的概率模型,预测在特定时刻和地点推荐候选位置对司机的潜在利润。这样做的目的是为了减少乘客等待时间,提高乘客体验,并在供需匹配中实现双赢。
在实施上,作者团队利用了超过12,000辆出租车的历史轨迹数据进行模型训练,确保推荐的准确性。这种方法不仅依赖于大数据的处理能力,还涉及到机器学习算法,如概率模型,来处理复杂的交通动态和乘客行为预测。
这个推荐系统是一项结合了地理位置、移动行为分析和收益预测的创新技术,它通过智能化的方式优化了出租车行业的运营效率和服务质量,提升了乘客和司机的满意度。这种应用对于提升城市交通系统的整体效能,降低拥堵,以及推动共享经济的发展都具有重要意义。
3
0 1 2 3 4 5 6 7
0
1
2
3
4
fare distance/unit time (m/s)
cruising distance/unit time (m/s)
density−→
r = 0. 0874
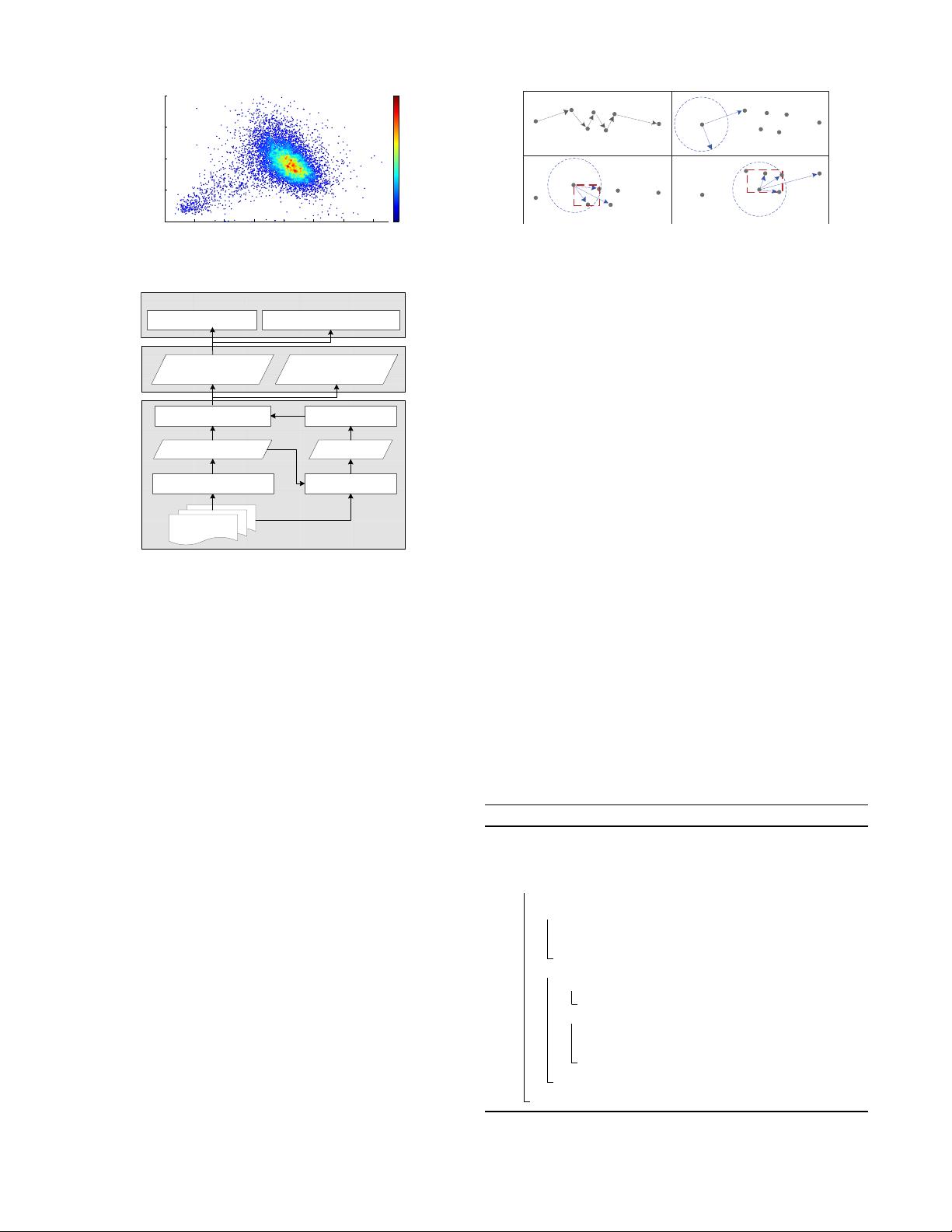
Fig. 2. Density scatter of cruising distance/unit time w.r.t.
profit
Trajectories
Parking Detection
Parking places
Segmentation
Trips
Map-MatchingStatistic learning
Knowledge of
road segments
Offline Mining
Knowledge of
parking places
Taxi Recommender Passenger Recommender
Online Recommendation
Fig. 3. System Overview
outperforms other approaches for low-sampling-rate GPS
trajectories. Later, we utilize the detected parking places
and the mapped trajectories to learn the time-dependent
statistical results based on a probabilistic model (Section 4).
To tackle the data sparseness problem, we devise a road
segment clustering method and perform statistical learning on
each road segment cluster instead of a single road segment
(Section 5). The above processes are performed offline and
will be repeated only when the trajectory data is updated
(e.g., once a month). Based on this model, we perform
recommendations to taxi drivers and passengers, given their
locations and current times (Section 6).
3 PARKING PLACES DETECTION
This section details the process for detecting parked status
from a non-occupied trip and accordingly finding out the
parking places in the urban area of a city based on a collection
of taxi trajectories.
3.1 Candidates Detection
Figure 4 demonstrates the parking candidate detection ap-
proach, given a non-occupied trip p
1
→ p
2
→ · · · → p
7
.
We first keep checking the distance (Great-circle distance)
between the current point and the latter point until the
distance is smaller than a threshold. As depicted in Figure
4 B), since dist(p
1
, p
2
) exceeds the distance threshold δ,
we move next, fixing p
2
as the “pivot” point and find that
dist(p
2
, p
3
) < δ, dist(p
2
, p
4
) < δ while dist(p
2
, p
5
) > δ
p
1
p
7
p
1
p
7
p
1
p
2
p
3
p
4
p
5
p
6
p
7
p
1
p
2
p
3
p
4
p
5
p
6
p
7
(A)
(B)
(C)
(D)
p
3
p
4
p
5
p
6
p
3
p
4
p
5
p
6
p
2
δ
p
2
Fig. 4. Detection of candidate parking places
(Figure 4 C). If the time interval between p
2
.t and p
4
.t is
larger than the time threshold τ , the three points that form
a small cluster represent a possible parking candidate. Next,
we fix p
3
as the pivot point and keep on the procedure to
check latter points. Finally, as shown in Figure 4 D), we
detect (p
2
, p
3
, p
4
, p
5
, p
6
) as a parking candidate because we
cannot expand this group any further, i.e., all the points in this
group have a distance farther than δ to p
7
. The pseudocode
is provided in Algorithm 1.
3.2 Filtering
Essentially, the candidate detection algorithm finds out the lo-
cations where the GPS points of a taxi are densely clustered,
with spatial and temporal constraints. However, a parking
candidate could sometimes be generated by taxis stuck in a
traffic jam, or waiting for signals at a traffic light, instead of
a real parking. To reduce such false selections, we design a
supervised model for picking out the true parked status from
the candidate set, using the following features:
• Spatial-Temporal features including 1) Minimum
Bounding Ratio (MBR). As shown in Figure 5(A),B)),
MBR is the area ratio between the bounding box of
the road segment (MBRr) and the bounding box of
the GPS points (MBRc) in the candidate set. 2) Av-
erageDistance. The average distance d
c
between points
in the candidate set and their nearest road segments, as
Algorithm 1: ParkingCandidateDetection
Input: A road network G, a trajectory J, distance threshold δ, time
threshold τ
Output: A set of parking candidates P = {P }
1 i ← 0, M ← kJk, P ← ∅, P ← ∅;
2 while i < (M − 1) do
3 j ← i + 1; flag ←false;
4 while j < M do
5 dist ←Distance (p
i
, p
j
);
6 if dist < δ then j ← j + 1;flag =true;
7 else break;
8 if p
j−1
.t − p
i
.t > τ and flag =true then
9 foreach point p ∈ J[i, j) and p /∈ P do
10 P .Add(p);/
*
build a candidate
*
/
11 if i = j − 1 then
12 P.Add(MB (P)); P ← ∅;
/
*
add the minimum bounding box of P
into P
*
/
13 i ← i + 1;
14 return P
剩余13页未读,继续阅读
2017-11-24 上传
2018-06-04 上传
2019-07-06 上传
2012-03-27 上传
2012-04-10 上传
2015-07-15 上传
2022-08-03 上传
2021-04-27 上传
2012-02-06 上传

ljpeng234
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
