改进ViBe算法的IC焊点自动光学检测新方法
54 浏览量
更新于2024-08-26
收藏 1.9MB PDF 举报
"该文章是关于一种新的基于改进视觉背景提取算法的自动光学检测系统IC焊点联合检测方法的研究论文,发表在IEEE Transactions on Components, Packaging and Manufacturing Technology期刊上。作者包括Nian Cai, Jianfa Lin, Qian Ye, Han Wang, Shaowei Weng和Bingo Wing-Kuen Ling。"
在自动光学检测(AOI)领域,集成电路(IC)焊点的缺陷识别一直是一项挑战性任务。受到计算机视觉中的视觉背景提取(ViBe)算法的启发,作者提出了一种创新的IC焊点检测方法,该方法基于改进的ViBe算法。据作者所知,这是首次将缺陷检测问题视为对象检测问题来处理。
首先,他们利用ViBe模型更新方案构建了一个焊点模型。ViBe算法是一种常用于视频分析中的背景建模方法,能有效地去除静态背景,突出动态物体。在本文中,该算法被改进以适应IC焊点的特定环境和特征。
接下来,通过将实际的焊点图像与经过充分训练的焊点模型进行比较,可以识别出可能存在的缺陷。这种方法能够捕捉到焊点图像中的异常变化,从而实现高精度的缺陷检测。
为了进一步提高检测效果,作者引入了频率图方法。频率图是一种图像处理技术,它能将图像转换为频域表示,以便于分析图像的高频成分,这些高频成分通常对应于图像中的细节和边缘,对于缺陷检测尤其有用。
此外,他们还定义了一个名为“缺陷程度”的度量标准,用于评估和量化检测到的焊点缺陷的严重程度。这个度量有助于优先处理严重缺陷,并对检测结果进行量化评估,提高了整个检测系统的可靠性和实用性。
该研究提供了一种新颖的、基于改进视觉背景提取的IC焊点自动检测策略,有望提升AOI系统的检测效率和准确性,对于集成电路制造的质量控制具有重要意义。
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
CAI et al.: NEW IC SOLDER JOINT INSPECTION METHOD FOR AN AOI SYSTEM 3
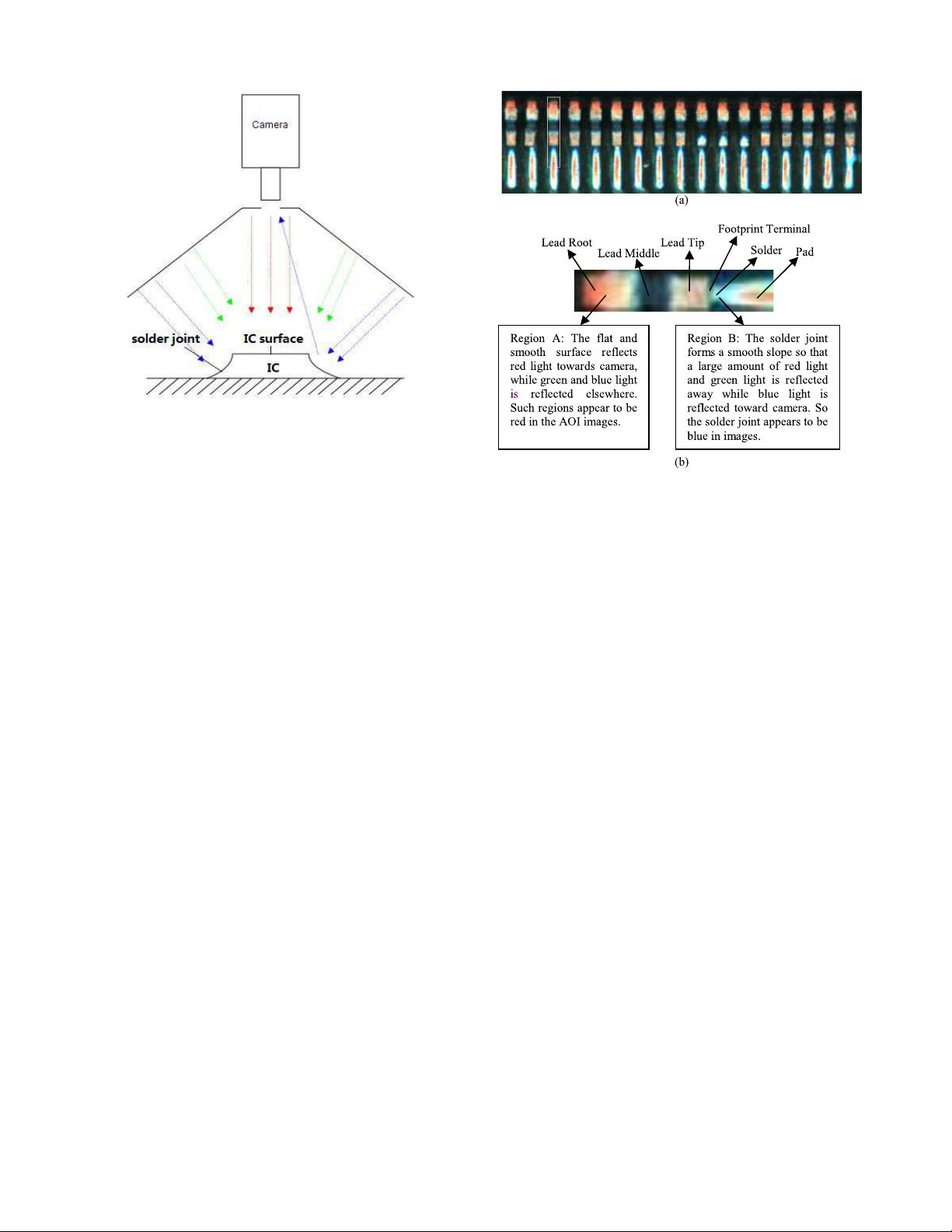
Fig. 1. AOI image acquisition system.
(red, green, and blue) hemispherical light-emitting diode array
illumination.
The red, green, and blue lights irradiate the solder joint
surfaces and are reflected onto the camera. Since the flats
and the slopes reflect different light components onto the
camera, the 3-D shape information of the solder joints may
be extracted from this acquired 2-D image. For the slopes of
the IC solder joints, a large amount of red lights and green
lights are reflected away, while the blue lights are reflected
toward the camera, which makes the solder joints appear to
be blue in the images. On the contrary, the flats of the IC pins
and the pads reflect the red lights toward the camera, while
green and blue lights are reflected elsewhere. Such flat regions
appear to be red in the images. An example of an obtained
IC solder joint image containing 16 qualified solder joints and
an unqualified one (the rightmost one) is shown in Fig. 2(a).
For a clear description, we zoom in on the third one on the
left in Fig. 2(a), which is marked by a white rectangle. It is
rotated counterclockwise by 90°, which is shown in Fig. 2(b).
In Fig. 2(b), Region A is located on the flat of the IC pin,
while Region B is located on the solder joint of this pin. That
is, Region B is located between the pin and the pad.
III. A
LGORITHM PRINCIPLE
In the ViBe algorithm for moving object detection, the pre-
vious frames of a video are input in sequence so as to produce
the templates, which approximately represent the model of real
background. The current frame is input and compared with the
trained templates. The parts of the frame failing to match the
templates are considered to be the foreground pixels.
A. Relationship Between Defect Inspection and ViBe
For moving object detection, each frame of a video contains
the background, the foreground, and some noise. To detect the
foreground, we should first build a background model. Then,
the foreground is detected by comparing the pixels of the input
frame with those of the model. It means that the input pixels
Fig. 2. IC solder joint image obtained by an AOI system. (a) Image with
17 IC solder joints. (b) Zoomed-in view of IC solder joint image.
mismatching the pixels in the model are considered as the
foreground pixels. This is similar to the problem of defect
inspection in an AOI system. For automatic inspection of
IC solder joints, an unqualified solder joint shows an abnormal
appearance at the specific location of the image compared with
a qualified one. That is, each unqualified solder joint image
contains the normal region, the abnormal region, and some
noise. Thus, detecting the abnormal region in a solder joint
image can be viewed as detecting the foreground in a frame of
a video. Therefore, we consider the unordered IC solder joint
images as the frames of an inspection sequence. Like moving
object detection, we can first use the inspection sequence to
establish a model representing a qualified solder joint. Then,
we detect the abnormal region by comparing the pixels of
the input solder joint image with the pixels of the established
model. In this paper, we use the ViBe background modeling
method [21] to train the qualified solder joint model. Since
our proposed inspection method statistically calculates the real
distribution of the hue channel values of a pixel using these
unordered images, we need not sort the frames of the sequence.
Since three channels of the hue-saturation-value model are
independent with each other, it is widely used in the fields of
image processing and computer vision. In addition, the hue
channel contains the major information for colors perception.
Thus, we use the hue channel of the solder joint image to
establish the qualified solder joint model. Here, the range of
the hue channel values is [0, 180).
For moving object detection, the background of the outdoor
scene often contains many nonstatic objects, such as tree
branches in the wind and ripples on the surface of the water.
The hue channel values of the pixels in these nonstatic
objects vary significantly. The ViBe algorithm models the
nonstatic objects and static scene excellently through several
剩余11页未读,继续阅读
2011-12-25 上传
107 浏览量
点击了解资源详情
2014-04-24 上传
2021-10-01 上传
2021-09-28 上传
2021-09-17 上传
2019-08-15 上传
2009-10-11 上传

weixin_38677227
- 粉丝: 4
- 资源: 929
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
