KEBA控制器应用与编程全面指南
需积分: 49 176 浏览量
更新于2024-07-21
10
收藏 7.54MB PDF 举报
"《KEBA控制器使用手册》是一份专业的机器人运动控制器指南,专为简化用户对KemroKeMotion应用和编程的理解和操作而设计。该手册是简体中文版,适合在KEBA CN V2.3版本下使用,位于上海市闵行区浦江高科技园区的新骏环路188号15幢101室。联系信息包括电话+862134637166和传真+862134637155,以及电子邮箱keba@keba.com和网址www.keba.com。
手册包含了丰富的章节,如:
1. KeTop简介部分详细介绍了KeTop界面,包括界面布局和主要功能,如配置管理、输入输出口监控、变量管理和项目管理等。其中,配置管理涉及系统维护和监控,输入输出口监控帮助用户实时了解设备状态,变量管理则关注系统参数的管理和控制,而项目管理涵盖了程序设计、执行管理和报警报告处理。
2. 运动指令组部分着重于PTP(定位运动)和Lin(线性运动)指令的使用,包括参数设置如pos(位置参数)、dyn(动态参数)、ovl(覆盖参数),以及如何根据具体需求配置不同的指令参数。
每个章节都配有详细的说明和示例,便于用户逐步掌握KeMotion的编程技巧和实际操作。此外,手册还强调了版权信息,声明Luphy保留手册最终解释权,并提供技术支持服务,鼓励用户在遇到问题时向科控工业自动化设备(上海)有限公司的KeMotion技术部寻求帮助。
这份手册是KEBA控制器用户的重要参考工具,无论对于初次接触的开发者还是经验丰富的工程师,都能从中找到所需的信息,提升工作效率和系统优化能力。"
请注意,手册版本更新至2.3,持续关注最新版本以获取最新的修改内容和功能介绍。

KeMotion 应用及编程手册 KeTop 简介
8
KeMotion 应用及编程手册
© KEBA 2014
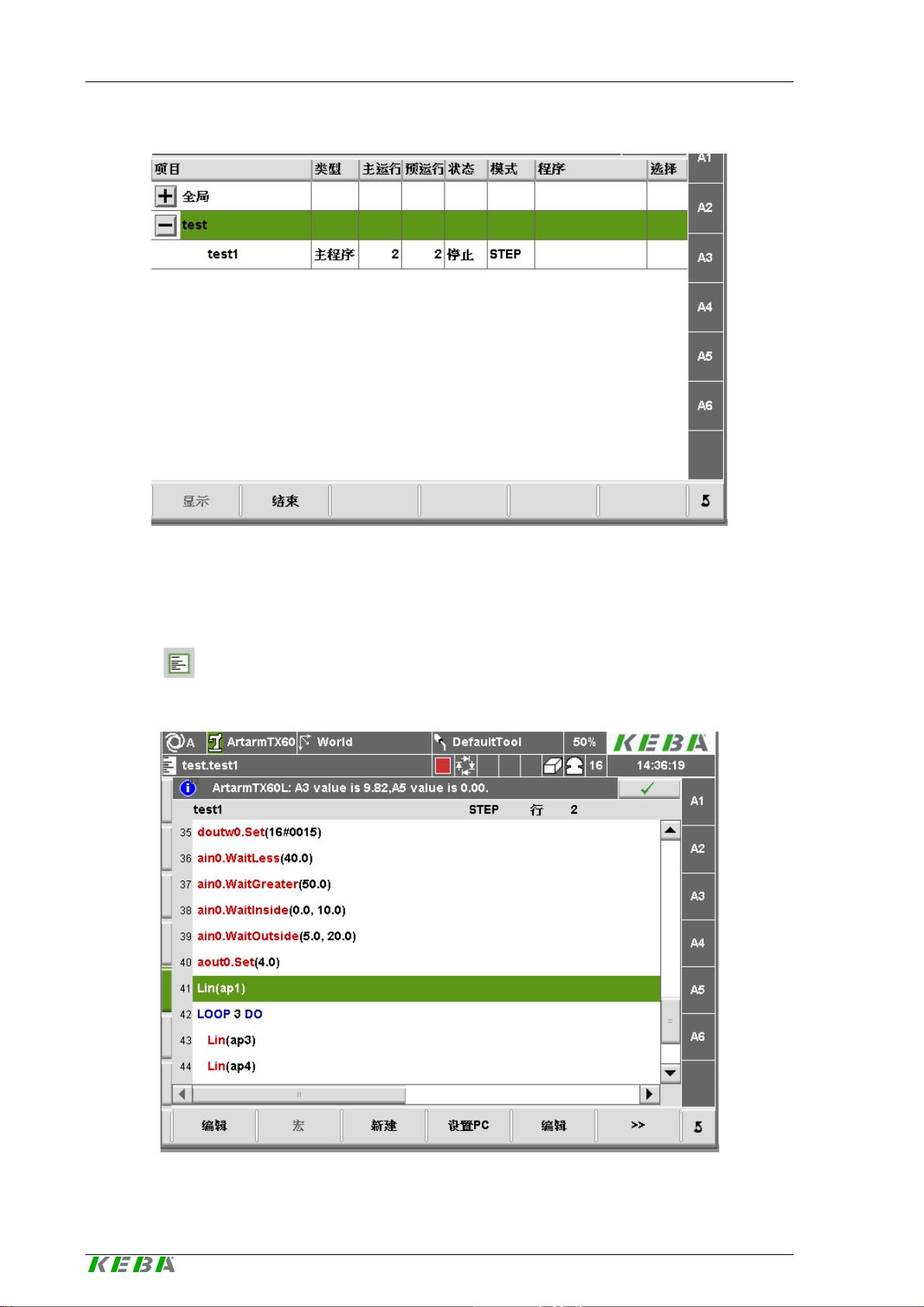
1.3 变量管理
变量监测点击该选项进入变量监测的界面,界面中分布着已经存在的系统变量、
全局变量以及项目变量,“+”可以展开显示,“-”可以收缩显示。并有变量类型过
滤器可选择,点击选择“ALL”,则显示所有变量。
点击变量按钮会展开删除、粘贴、复制、剪切、重命名、新建选项,用以对某项
或子目录下的变量进行操作。


剩余145页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

qq_28948797
- 粉丝: 3
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
