履带吸盘爬壁机器人:构造原理与开发创新
版权申诉
160 浏览量
更新于2024-07-08
收藏 7.26MB DOC 举报
本文档深入探讨了履带吸盘式爬壁机器人结构原理的研究与开发。在当今科技发展背景下,爬壁机器人作为一种特殊类型的机器人,因其能够在垂直或不规则表面进行高效移动和作业,具有很高的实用价值。本文首先介绍了爬壁机器人构造原理研究的重要性和当前市场上的主要类型,如车轮式磁吸附、多吸盘单链(如Cleanbot–IV)和履带式磁吸附爬壁机器人。
作者选择了履带吸盘式作为研究对象,这种设计的优势在于其能够提供更好的壁面适应能力和抓附力。章节二详细阐述了履带吸盘式爬壁机器人的功能需求,包括工作流程、基本功能和关键设计参数,例如履带的构造形式、与履带轮的连接方式以及壁面适应能力的分析。吸盘式吸附机构是核心部分,设计时考虑了吸盘机构的结构、吸盘的抓持力和安全性。
同时,文档还涉及了机器人气动回路的设计,如配气盘构造和吸盘气动控制系统的构建,这些对于保证机器人的精确操作和工作效率至关重要。在第三章,作者进一步对履带吸盘式爬壁机器人的吸附构造进行了设计与论证,确保其在实际应用中的可靠性和有效性。
整个研究不仅涵盖了理论分析,还包含了实验验证和论证,以期通过综合运用机械设计、电子控制和材料科学等多学科知识,实现履带吸盘式爬壁机器人的创新设计和优化。通过这篇论文,作者不仅展示了对履带吸盘式爬壁机器人构造原理的深入理解,也为同类机器人的未来发展提供了有价值的参考和创新思路。

. .
的科研人员都提出了自己的爬壁机器人的构造方案,这些构造方案在原理和构造
布局上有着较大的不同。下面列出三种较为典型同时也是与履带吸盘式爬壁机器
人的研究相关的构造原理科研实例,通过分析这些设计实例的优缺点可以引出在
爬壁机器人构造原理设计时需要注意与注重的问题。
,,车轮式磁吸附爬壁机器人
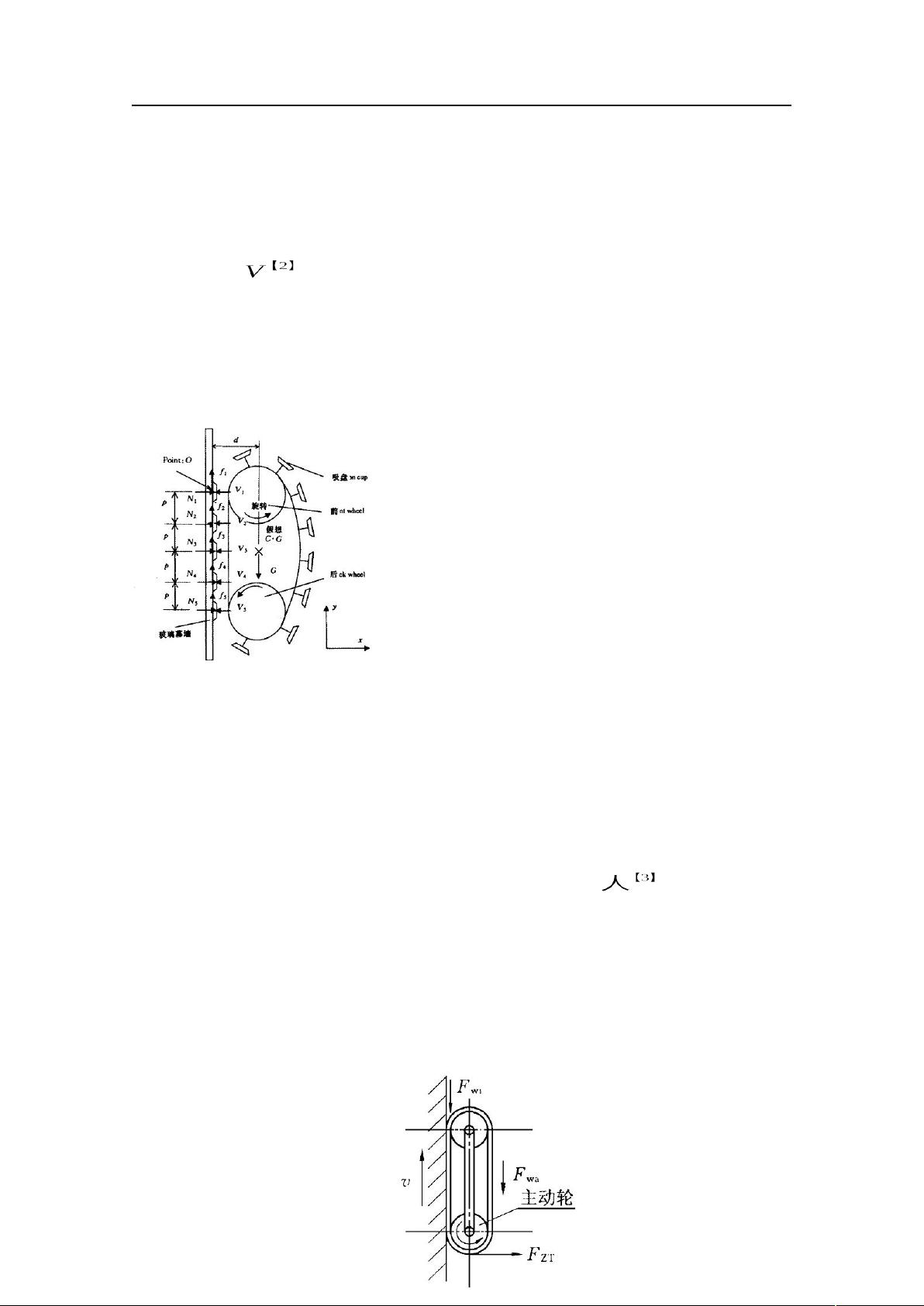
日本应用技术研究所研制出的车轮式磁吸附爬壁机器 ,构造原理如右
图所示。机器人靠磁性车轮对壁面产生吸附力吸附在各种大型构造物如油罐、球
形煤气罐、船舶等的壁面,代替人进展检查或修理等作业。
主要特征是:行走稳定、速度快
图,!,车轮式磁
吸附爬壁机器人〔图片来自文献7,8〕
最大速度可达49,适用各种形状的壁面,且不损坏壁面的油漆。但是
该机器人有自己的缺点:磁吸附使它仅适用于导磁材料壁面,即这种原理有其使
用局限性;车轮式的行走方式使维持一定的吸附力较困难,车轮的直径会使机器
人相对于壁面的扭矩增大,使机器人运行的稳定型和平安性相应降低;车轮的行
走轨迹是连续的,这不利于机器人跨越壁面的凹凸不平处,使机器人对壁面的平
整质量要求提高。
. .jz.

剩余63页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-07-15 上传
2021-09-24 上传
2023-07-15 上传
2024-11-03 上传
2024-11-03 上传
2023-07-15 上传

wdqsv88
- 粉丝: 4
- 资源: 13万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
