Linux内核中断机制解析
需积分: 2 163 浏览量
更新于2024-09-12
收藏 102KB PDF 举报
"Linux中断机制详解"
在Linux操作系统中,中断扮演着至关重要的角色,它使得硬件设备能够及时地与CPU通信,处理突发事件。本文主要针对Linux内核版本2.4.18-10,详细阐述中断的概念和实现原理。
1. Linux中断
Linux中断系统确保了系统的实时性和高效性。在任何时刻,一个Linux系统中的CPU可以处于以下三种状态之一:
- 服务硬件中断(在内核模式下)
- 服务软中断、任务例程或底半部(也在内核模式下)
- 运行用户模式下的进程
这些状态之间存在严格的优先级关系。除了用户模式之外,其他模式都可能被更高优先级的任务抢占。例如,当一个软中断正在执行时,其他软中断不会中断它,但硬件中断可以。
2. 中断与异常
中断是异步事件,通常由I/O设备触发,与处理器指令的执行不同步。而异常则通常是由于软件错误(如除零错误或非法指令)导致,也可能是硬件管理的同步事件(如页故障)。中断和异常都需要被内核妥善处理。
3. 中断类型
在Linux中,中断分为两类:硬件中断和服务中断。硬件中断是由外部设备(如网卡、键盘、硬盘控制器等)产生的,用于通知CPU有紧急事件需要处理。服务中断,包括软中断、任务例程和底半部,是由内核自身生成,用于在适当的时间处理硬件中断后的后续工作。
4. 初始化与处理
中断的初始化涉及设置中断描述符表(IDT,Interrupt Descriptor Table),这是一个包含每个中断或异常处理程序地址的数据结构。硬件处理涉及到当硬件中断发生时,CPU如何响应并切换到适当的中断服务例程。软件处理则涵盖了如何在内核上下文中调度和执行中断处理代码。
5. 软中断、任务例程和底半部
软中断是一种轻量级中断,可以在硬件中断处理完成后立即执行,或者在其他合适的时间。任务例程(tasklet)和底半部(bottom half)是软中断的变体,用于进一步拆分硬件中断处理流程,提高处理效率。
6. 中断数据结构
Linux内核维护了一系列数据结构来跟踪和管理中断,如中断请求(IRQ)结构、中断处理函数等。这些数据结构帮助内核有效地调度中断处理,并确保并发处理的安全。
Linux中断机制是其内核核心功能之一,它确保了系统对硬件事件的快速响应,同时也为内核提供了一种处理异步事件的机制。理解中断的工作原理对于优化系统性能、调试驱动程序以及开发内核级软件至关重要。
Linux Interrupts: The Basic Concepts
Mika J. Järvenpää
University of Helsinki
Department of Computer Science
mjjarven@cs.helsinki.fi
ABSTRACT
The idea of this document is to shed some light to the con-
cepts and main ideas of implementation of interrupts in
Linux kernel. Main focus is in Linux kernel version 2.4.18-
10.
1. LINUX INTERRUPTS
At any time one CPU in a Linux system can be:
- serving a hardware interrupt in kernel mode
- serving a softirq, tasklet or bottom half in kernel mode
- running a process in user mo de.
There is a strict order between these. Other than the last
category (user mode) can only be preempted by those above.
For example, while a softirq is running on a CPU, no other
softirqs will preempt it, but a hardware interrupt can.
In the next chapters different interrupt and exception types,
initialization, hardware handling and software handling of
interrupts, interrupt data structures and terms like IDT,
b ottom half, softirq and tasklet are explained in more detail.
2. INTERRUPTS AND EXCEPTIONS
An interrupt is an asynchronous event that is typically
generated by an I/O device not synchronized to processor
instruction execution.
An exception is a synchronous event that is generated when
the processor detects one or more predefined conditions
while executing an instruction.
Interrupts can be divided to maskable interrupts and
non-maskable interrupts.
Also exceptions can be divided to pro cessor-detected
exceptions ie. faults, traps, aborts and programmed
exceptions. Example of fault is Page fault. Traps are used
mainly for debugging purposes. Aborts inform about hard-
ware failures and invalid system tables and and abort han-
dler has no choice but to force affected process to terminate.
[1], [3], p. 4-9, 4-10.
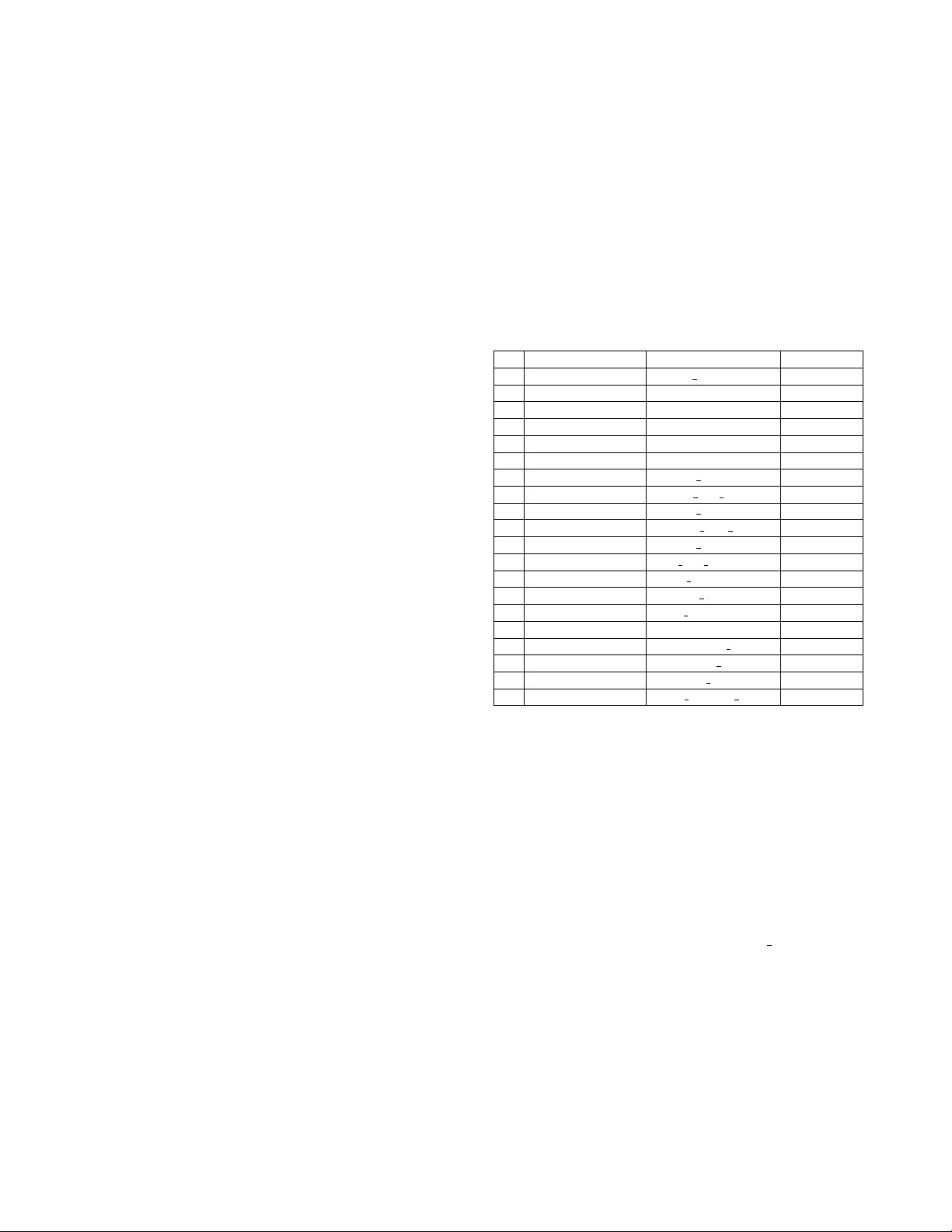
Table 1: Signals sent by the exception handlers
# Exception Handler Signal
0 Divide error divide error() SIGFPE
1 Debug debug() SIGTRAP
2 NMI nmi() None
3 Breakp oint int3() SIGTRAP
4 Overflow overflow() SIGSEGV
5 Bounds check b ounds() SIGSEGV
6 Invalid opcode invalid op() SIGILL
7 Device not avail. device not avail.() SIGSEGV
8 Double fault double fault() SIGSEGV
9 Copro c.seg.ovr. copro c. seg. ovr.() SIGFPE
10 Invalid TSS invalid tss() SIGSEGV
11 Seg. not present seg. not present() SIGBUS
12 Stack seg. fault stack segment() SIGBUS
13 General protect. general prot.() SIGSEGV
14 Page fault page fault() SIGSEGV
15 Intel reserved None None
16 FP error copro cessor error() SIGFPE
17 Alignment check alignment check() SIGSEGV
18 Machine check machine check() None
19 SIMD coproc.err simd coproc. error Dep ends
2.1 Exception and Interrupt Vectors
Intel architecture identifies different interrupts and excep-
tions by a number ranging from 0 to 255 ([5], p. 4-11).
This number is called a vector. Linux uses vectors 0 to
31, which are for exceptions and non-maskable interrupts,
vectors 32 to 47, which are for maskable interrupts ie. in-
terrupts caused by interrupt requests (IRQs) and only one
vector (128) from the remaining vectors ranging from 48 to
255, which are meant for software interrupts.
Linux uses this vector 128 to implement a system call ie.
when an int 0x80 opcode ([6]) is executed by a process
running in user mode the CPU switches into kernel mode
and starts executing kernel function system call().
2.2 Hardware Interrupts
Hardware devices capable of issuing IRQs are connected to
Interrupt Controller. The Intel 8259A Programmable Inter-
rupt Controller (PIC) handles up to eight vectored prior-
ity interrupts for the CPU and PICs can be cascaded ([2]).
Typical configuration for 15 IRQs is cascade of two PICs.
PIC can remember one IRQ while IRQ is masked. Vector
of masked IRQ is sent to CPU after unmasking. Processing
of previous interrupt is finished by writing End Of Interrupt
下载后可阅读完整内容,剩余6页未读,立即下载
297 浏览量
217 浏览量
117 浏览量
265 浏览量
2022-09-20 上传
164 浏览量
136 浏览量
131 浏览量
266 浏览量

Sagar
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 销售管理系统的论文材料.doc
- UML分析与设计.pdf
- 超市销售管理系统.doc
- 用Eclipse软件更新方法安装JSEclipse
- Flex 3 Cookbook 中文版V1
- petstore数据模型分析
- The big SoftICE howto.pdf
- 微软原版教材2555A课程(带翻译).pdf
- javascript高级教程
- 进销存系统 详细设计
- Transfering-Data-between-SAS-and-Stata
- SD Specifications version2.0
- 中南大学 先进控制 大爱迪达
- JasperRepor iReport整合的Web报表开发
- asp.net2.0数据库入门经典DOC格式
- pso算法基本概念和实现
