ER20-C10机器人编程指南:从入门到精通
需积分: 9 69 浏览量
更新于2024-07-21
2
收藏 5.89MB PDF 举报
"ER20-C10 机器人编程手册由安徽埃夫特智能装备有限公司编撰,详细介绍了该型号机器人的编程和操作。手册涵盖从概述、示教器操作、急停及开关机、手动操作、文件管理、编程示教、运行程序到状态显示等多个方面,旨在帮助用户全面理解和掌握ER20-C10机器人的使用。
1. **概述**
ER20-C10机器人系统包括机器人本体、控制装置和手持示教器,适用于点焊、弧焊、搬运等多种任务。其主要参数如末端负载为20KG,具有六个运动轴,具体运动范围、速度和重复定位精度可在机械手册中查阅。编程方式包括在线编程和离线编程。
2. **操作者**
操作机器人的人员应经过专门培训,确保在安全条件下进行生产。机器人需要与外围设备配合使用,并配备安全防护设施。
3. **示教器**
- 开机界面和按键详述:提供了示教器的基本操作指南。
4. **急停及开关机**
- 急停装置:详细说明了紧急情况下如何停止机器人运行。
5. **手动操作**
- 坐标系和速度设置:介绍如何设定机器人的工作坐标和运动速度。
- 手动操作和状态确认:指导用户如何在手动模式下控制机器人并检查其运行状态。
- 位置数据:解释了如何查看和处理机器人的位置信息。
6. **文件管理**
- 文件的新建、删除、下载、打开和关闭:涵盖了文件操作的基本流程。
- 变量添加:说明如何在编程中添加和管理变量。
7. **编程示教**
- 指令:列出了可用的编程指令及其功能。
- 复合使用指令:教导用户如何组合使用指令以实现更复杂的任务。
- 示教过程和一般步骤:详述了从开始编程到完成示教的完整过程。
- 修磨点和维修点:讲解了特殊点的设置和使用。
8. **运行程序**
- 启动机器人和加载程序:阐述了如何启动机器人执行程序以及加载新的程序。
9. **状态显示**
- 示例教盒状态:描述了如何通过示教器监控机器人系统的运行状态。
10. **应用实例**
- 点焊机器人和搬运机器人:提供了这两种应用场景的示例程序,帮助用户理解实际操作。
该手册是ER20-C10机器人用户的重要参考资料,通过深入学习和实践,用户可以熟练掌握机器人的各项功能和安全操作规程,从而高效、安全地运用机器人进行生产作业。
ER20-C10 机器人编程手册
—
7
—
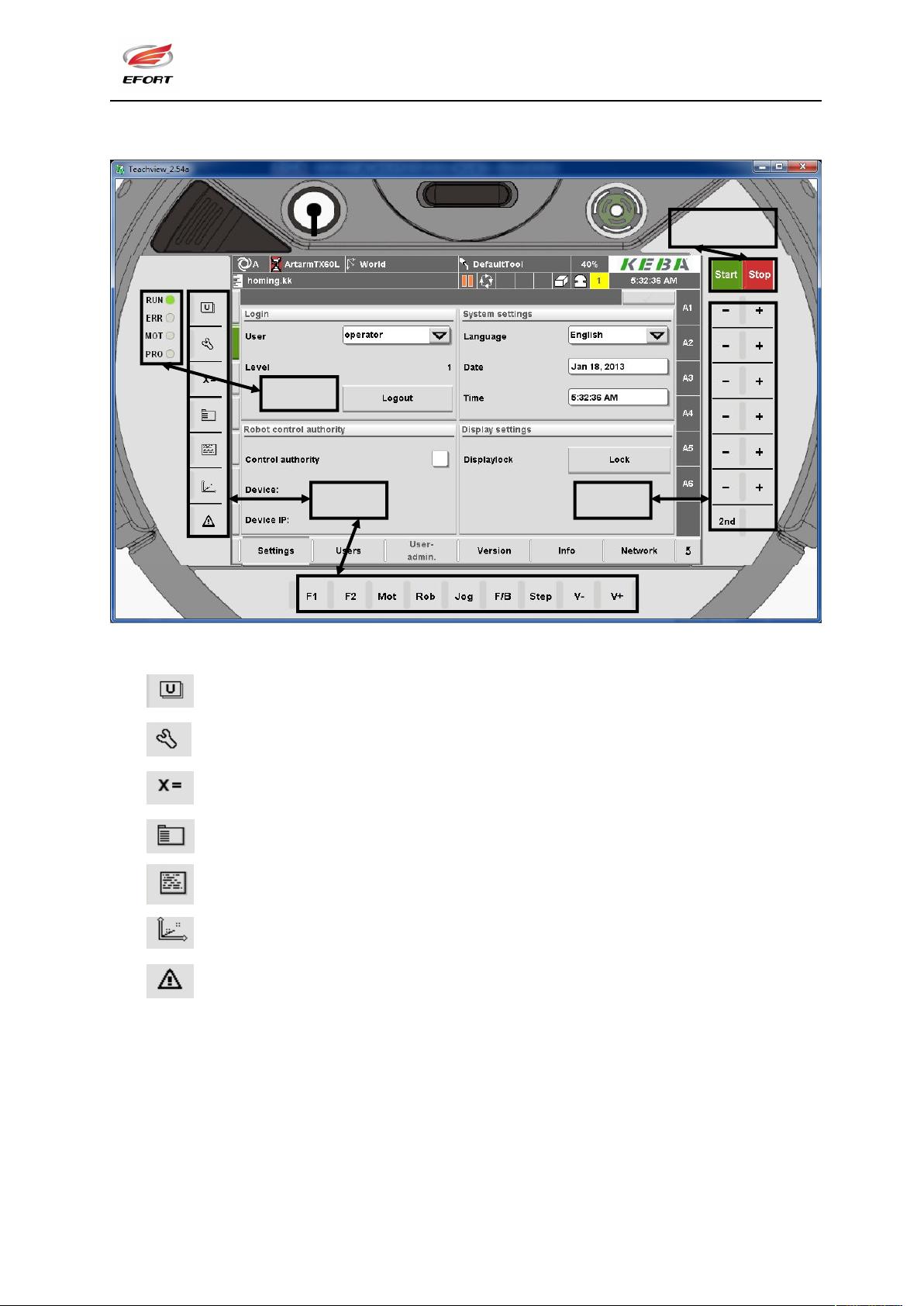
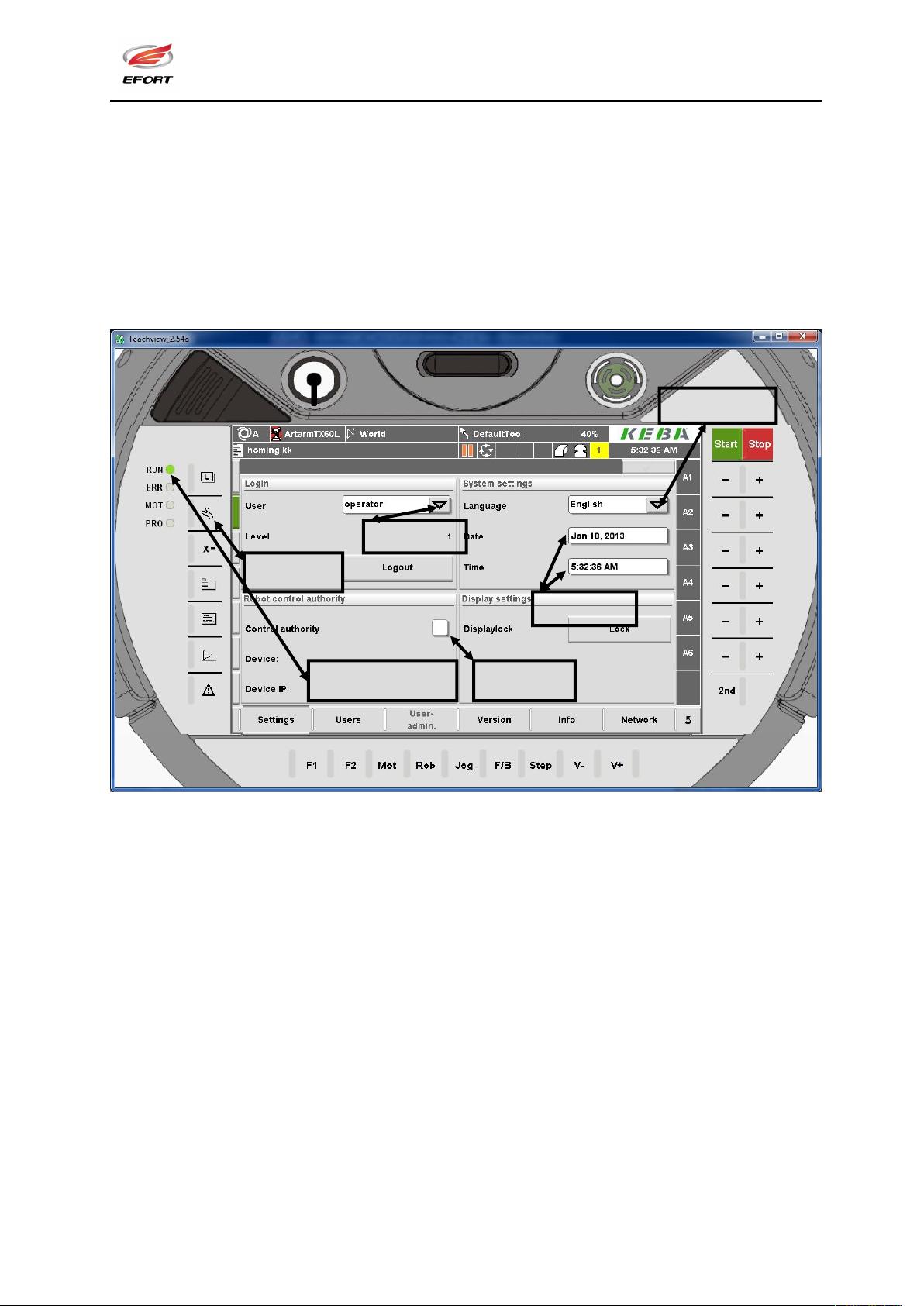
2.2 按键详述
图 2.2.1 示教盒按键分布
:预留
:用户
——
登陆,语言选择,权限转换等
:变量
——
变量查看、添加和修改等
:工程——新建,打开程序,下载程序,关闭文件等
:程序——修改、复制、粘贴、打开、删除等;
:坐标——进入点动操作界面
:报警、报告
——
文字形式显示报警或报告内容
F1
、
F2
:功能扩展键,(在焊接机器人
F1
大开,
F2
闭合)
Mot:
开关伺服;
Jog:
坐标变换
F/B:
程序运行位置设定
Step
:单步
/
连续;
指示灯
功能键
起停按钮
点动键
剩余56页未读,继续阅读
5681 浏览量
128 浏览量

j2578562645
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebMiniProject
- ns-react-18next:[未维护]命名空间中的i18next本地化ReactSwift
- TemplateVue-bootstrap3-sass:模板
- 一组医疗图标 .xd .sketch .svg .fig素材下载
- Rad Studio XE 10.4 Patch 补丁合集 截止2020.7.29
- 基于HTML实现的仿智慧园区触屏版html5手机门户网站模板下载(css+html+js+图样).zip
- rhythmless.github.io:我的互联网片段
- BalanceCar调试版,计算机博弈大赛c语言源码,c语言
- qblueRed42.github.io
- torchdrift-redisai:RedisAI中的TorchDrift
- rnp-find:用于探索RNA与蛋白质相互作用的生物信息学工具
- ant-apache-bcel-1.9.3.zip
- C1220G1_NguyenDucHau
- flutter-localized-locales:Flutter插件,它提供语言环境代码到563个语言环境的名称映射
- html推箱子.zip
- 基于PCB的最新PCB及相关材料IEC标准信息 国际电工委员会.zip
