挠性航天器T-S模糊控制:非线性动力学建模与稳定性保障
10 浏览量
更新于2024-09-03
收藏 287KB PDF 举报
本文主要探讨了"基于T-S模型的一类挠性航天器模糊控制"这一领域的研究。作者白圣建和黄新生来自国防科技大学机电工程与自动化学院,他们关注于现代航天器在实际应用中面临的挑战,特别是挠性附件如太阳帆板对航天器本体姿态产生的耦合作用。这类航天器通常具有大结构、低阻尼和强耦合的特点,这对其姿态控制的精度和稳定性构成了严峻考验。
挠性振动与刚性主体的耦合是关键问题,传统的刚性航天器控制方法,如PID控制,在处理这类复杂情况时显得力不从心。为了寻求更有效的控制策略,文章引入了模糊控制,尤其是T-S模糊系统,因为它的后件线性特性使得非线性问题可以通过线性系统理论进行处理。T-S模型因其表达复杂系统动态特征的能力而受到广泛关注,Buckley的研究证明了其作为完备控制器的有效性。
本文的核心贡献在于提出了一种将挠性航天器的非线性状态方程转换为T-S模型的方法,并利用这种方法构建了航天器的T-S模糊模型。接着,作者采用PDC(平行分布补偿)控制技术结合极点配置策略,设计了一种控制器。通过求解线性矩阵不等式(LMI),得到了正定矩阵P,确保了模糊控制系统的渐进稳定性。
最后,数值仿真结果证实了所设计的模糊控制器在实际应用中的有效性,能够实现高精度的姿态定位,同时抑制挠性结构振动,保证机动过程的平稳性。这表明该方法对于挠性航天器的大角度姿态机动控制具有重要意义,为解决此类复杂系统控制问题提供了一个创新的解决方案。本文的研究不仅推动了航天器控制技术的发展,也为其他领域的柔性系统控制提供了新的思路。
http://www.paper.edu.cn
基于 T-S 模型的一类挠性航天器模糊控制
白圣建 黄新生
国防科技大学机电工程与自动化学院 3 系(410073)
email: baisj@mail.edu.cn
摘 要:现代航天器的控制面临着挠性附件对本体姿态的耦合作用,本文将帆板挠性结构对
本体姿态的影响增广进系统方程。以此为背景,提出了一种将非线性状态方程转化为 T-S
模型的方法,运用该方法将挠性航天器状态方程表示为 T-S 模型。结合 PDC 模糊控制和极点
配置方法设计控制器,求解线性矩阵不等式(LMI)得到正定矩阵 P,保证了模糊控制系统
的渐进稳定性。数值仿真结果表明该模糊控制器是行之有效的。
关键词:挠性航天器;T-S 模糊模型;线性矩阵不等式;并行分配补偿;极点配置
1 引言
由于现代航天任务的需要,航天器大都带有挠性附件,如太阳帆板,板形天线等,本文
研究的带太阳帆板的挠性航天器具有典型的代表意义,它具有结构大、阻尼弱、强耦合等特
点。挠性振动与刚性本体运动的耦合是影响航天器姿态控制精度及稳定性的重要因素, 因此
挠性航天器大角度姿态机动控制不但要求能迅速实现高精度姿态定位,而且要求能尽快抑制
挠性结构振动,保持机动过程平稳。这对控制系统的设计提出了严格的要求,使得针对刚性
航天器的传统控制方法(如常规PID控制)难以满足要求,促使人们寻求更加有效的控制策
略,其中,引入智能控制是一个有效的途径
[1-3]
。模糊控制是智能控制的一个分支,其中尤
以针对T-S模糊系统的稳定性分析比较成熟
[4,5]
。T-S(Takagi-Sugeno)
[6]
模糊模型是一种非线
性模型,易于表示复杂系统的动态特征。自该模型提出以来,基于该模型的非线性系统控制
方法引起了人们浓厚的兴趣,原因在于T-S模糊模型的后件是线性的,可以运用线性系统完
善的理论成果来处理非线性问题,Buckley已证明这种控制器是一种完备的控制器
[7]
。由
H.O.Wang等人提出的PDC(Parallel distributed compensation)控制
[8]
就是其中的一种。
本文研究了一类中心刚体带有两块柔性帆板的挠性航天器,建立了其刚柔耦合动力学模
型;提出了一种将非线性方程转化为 T-S 模糊模型的方法,并运用该方法建立了挠性航天器
的 T-S 模糊模型;结合 PDC 控制和极点配置方法设计了控制器,通过求解线性矩阵不等式
(LMI)证明了控制系统的稳定性,最后给出了仿真结果。
2 系统动力学方程及状态方程
2.1 系统动力学方程
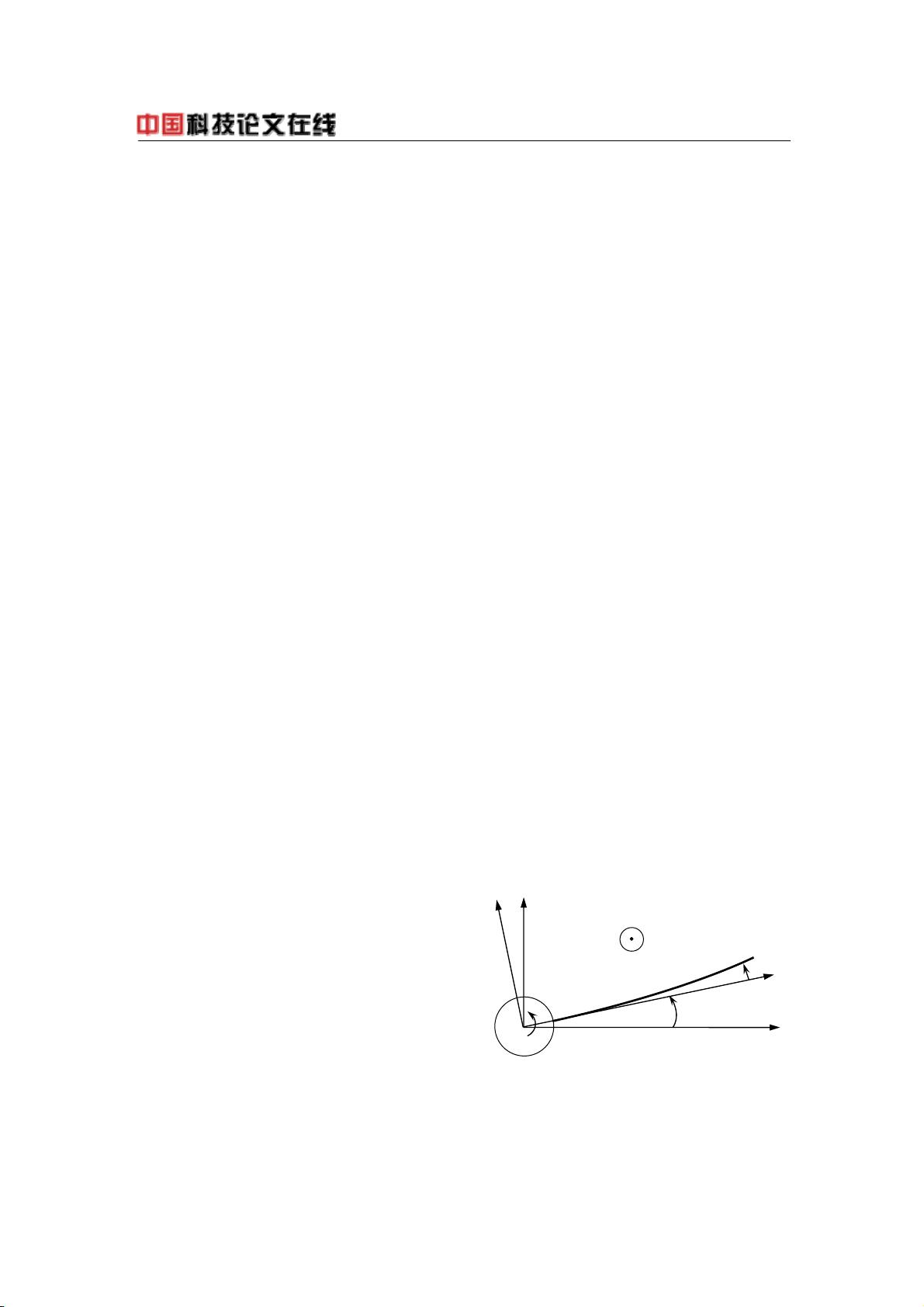
考虑如图 1 所示的挠性航天器,它由一
个中心刚体和固联其上的两个对称的柔性
帆板(视为柔性梁)组成(另一个未画出)。
中心刚体限于绕 轴转动, 表示帆板
由于弯曲振动产生的线位移。
T
为作用在中
心刚体上的控制力矩。设 是以
O 为
原点,以 为垂直垂直轴的轨道正交坐标
系,是以为原点,和重合的固联在刚体上的正交坐标系, 与梁未变形时方向一致。
z
(
,uxt
)
00 0
OX Y Z
0
OZ
1
OX
0
X
0
Y
1
X
1
Y
0
()
t
θ
()
,uxt
R
0
,
Z
Z
T
图 1 挠性航天构形
将系统按三个体处理
[9]
,结合有限元和数值积分
[10]
,略去柔性模态坐标的二次项,得到
- 1 -
下载后可阅读完整内容,剩余6页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-11 上传
2021-08-29 上传
2021-09-12 上传
2021-09-08 上传
2021-09-11 上传
2021-09-12 上传

weixin_38621104
- 粉丝: 1
- 资源: 957
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
