Apollo实战:车辆循迹驾驶技术详解
需积分: 5 44 浏览量
更新于2024-08-05
1
收藏 2.07MB PDF 举报
"Apollo实战——车辆与循迹驾驶能力实战,涉及到自动驾驶技术中的底盘线控、定位和控制模块,是自动驾驶系统的基础。循迹测试用于验证自动驾驶车辆的软硬件环境,主要包括线控车辆、工控机、GPS和IMU等硬件。在硬件适配方面,可能需要编写新的Vehicle模块、管理Can卡,并在控制模块中根据需要添加自定义控制算法。定位模块是关键,Apollo提供了RTK和MSF两种定位方式,循迹测试通常只需要GPS。"
在自动驾驶领域,Apollo是一个广泛使用的开源平台,本课程聚焦于Apollo的实战应用,特别是车辆的循迹驾驶能力。循迹驾驶允许车辆沿着预设轨迹行驶,这是验证自动驾驶系统基本功能的重要手段。它涉及到三个关键模块:定位、控制和Canbus。定位模块确保车辆准确知道自己在地图上的位置,控制模块则负责根据定位信息和预设轨迹调整车辆行驶状态,Canbus模块则负责车辆内部通信,确保指令能正确传递给各个执行机构。
在硬件准备阶段,一辆线控车辆是基础,这意味着车辆的加速、转向等操作能够通过电子信号远程控制。此外,工控机作为计算平台,处理各种传感器数据,惯导系统(GPS和IMU)则提供高精度的位置和姿态信息。如果使用非参考硬件,需要进行适配工作,例如创建新的Vehicle模块来对接硬件,管理Can卡以适应不同供应商的通信协议,以及在必要时定制控制算法以满足特定车辆的控制需求。
在控制模块中,Apollo提供了开放的架构,大多数情况下无需自定义算法。但如果车辆的动态特性与默认设置差异较大,可能需要开发个性化的控制策略。定位模块是另一个核心部分,Apollo支持RTK(实时动态差分定位)和MSF(多传感器融合)两种定位技术,前者依赖基站和GPS+IMU,后者结合Lidar点云进行匹配。对于循迹测试,仅需GPS定位即可。
完成硬件设备的配置后,用户可以通过Apollo的人机交互界面(HMI)启动循迹测试,验证系统的综合性能。这个过程不仅检验了自动驾驶系统的准确性,也测试了各个模块的集成度和稳定性,是评估自动驾驶系统成熟度的关键步骤。
进阶课程
㊷
丨Apollo实战——车辆与循迹驾驶能力实战
循迹自动驾驶是指让车辆按照录制好的轨迹线进行自动驾驶,其涉及到自动驾驶中最基本的底盘线控
能力、定位能力、控制能力,是自动驾驶系统的一个最小子集。
以下,E N J O Y
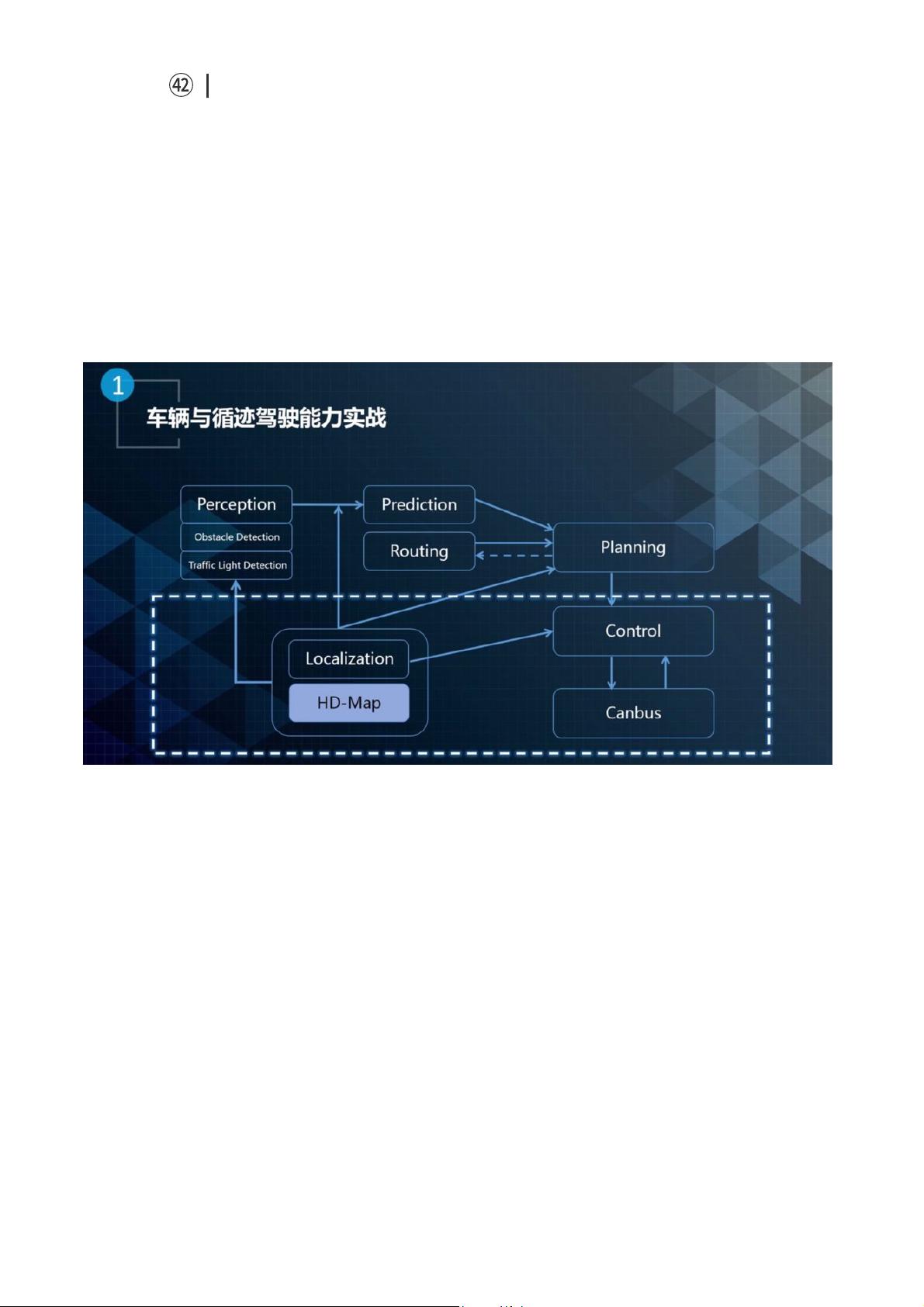
在搭建完自动驾驶车辆的软、硬件环境以后,通常采用循迹测试进行验证,如图1所示。
图1 循迹测试涉及的Apollo模块
循迹测试涉及最底下的几个模块,只需要定位、控制以及Canbus这三个模块,是Apollo的最小子
集,通过循迹可以验证车的线控能力以及模块的整体集成能力。
那么如何做循迹测试呢?首先在硬件上,我们需要一辆线控车辆、一个工控机以及惯导系统GPS和
IMU,如图2所示。
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-05-04 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传









