无人机通信优化:三维连续移动控制与节能覆盖
122 浏览量
更新于2024-08-28
收藏 1.65MB PDF 举报
"Three-Dimensional Continuous Movement Control of Drone Cells(持续更新) - 无人机通信 - IEEE链接"
本文关注的是无人机通信领域中的一个关键问题,即三维连续运动控制,以实现能源效率高的通信覆盖。随着无线网络对敏捷性、弹性和快速服务恢复需求的增长,无人机辅助覆盖成为了解决临时高密度用户区域通信需求的有效手段。在诸如自然灾害或大型活动等场景下,传统基础设施可能无法迅速响应,而无人机因其快速部署和灵活性,成为了理想的解决方案。
文章的核心贡献在于探讨如何通过优化无人机的移动策略来提供最佳通信质量,同时兼顾能耗、用户服务质量(QoS)、覆盖范围的公平性和网络连接性等多个关键因素。设计基于深度强化学习(DRL)的无人机蜂窝网络,以实现节能通信覆盖是一项具有挑战性的任务。
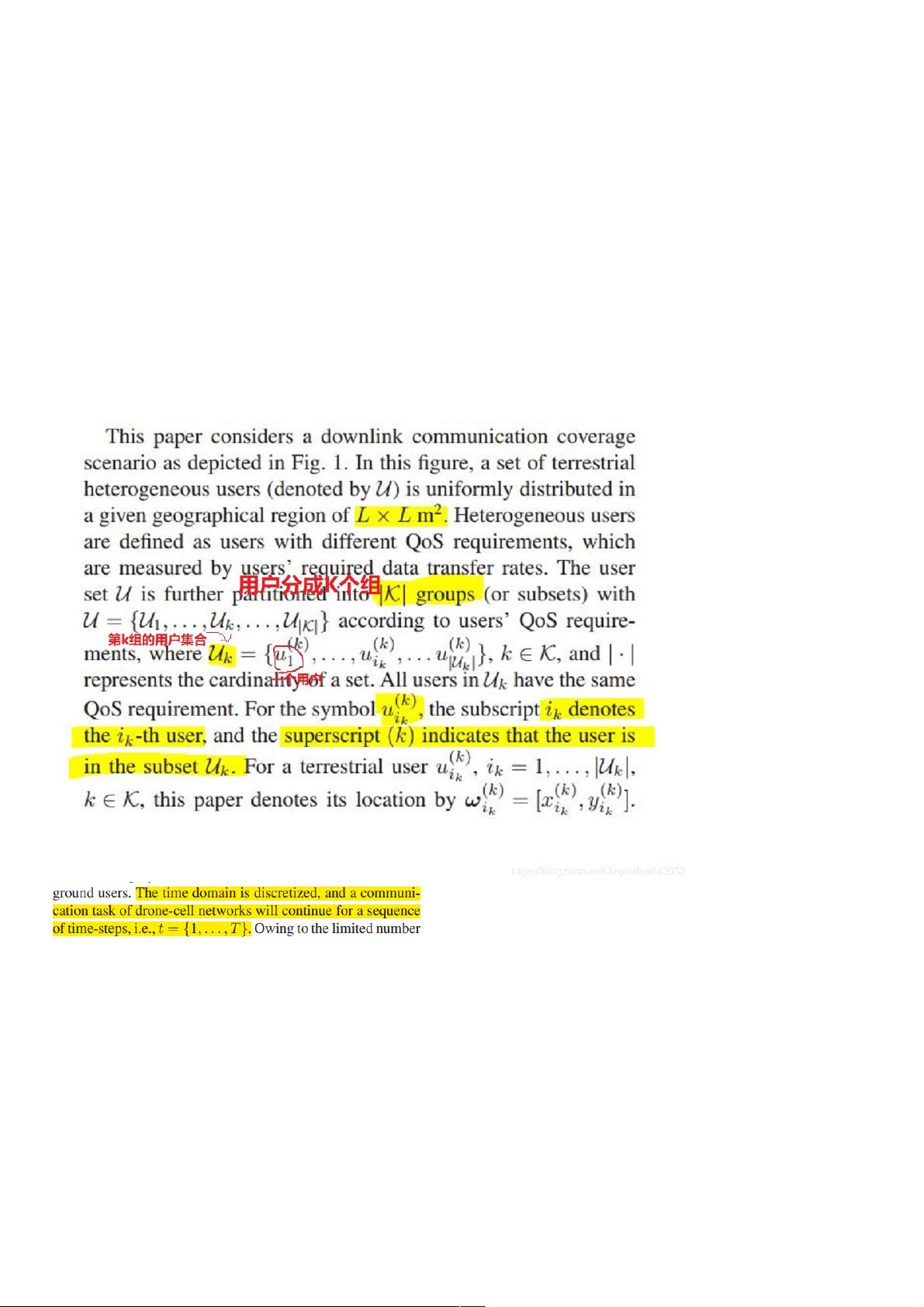
模型部分详细阐述了无人机的移动模型和信道传播模型。无人机的运动被划分为离散的时间步,并在此基础上做出决策。符号集中,用户数据速率用C表示,不同时间步和位置的通信速率用bt,ik,j(k)b_{t,i_k,j}^{(k)}bt,ik,j(k),表示,它们属于集合k和i的特定用户。
文章进一步探讨了空对空(air-to-air)和空对地(air-to-ground)信道的构建,这对于理解无人机通信环境至关重要。为了衡量覆盖的公平性,引入了Jain's fairness指标,该指标有助于平衡各个用户的通信服务质量。此外,文章还建立了能耗问题的数学模型,旨在找到最佳部署高度,这直接影响到无人机的能源效率。
强化学习(RL)在解决这个问题中扮演了重要角色,无人机需要学习在每个决策周期(或时间步)选择合适的动作(action),以最大化预期的奖励(reward)。在设计算法时,边界边缘机制被考虑进来,以确保无人机在覆盖区域的边界附近保持安全距离,防止通信中断。
本文的研究不仅对于提升无人机通信的效率和覆盖范围具有理论价值,而且对实际部署中的无人机网络规划和管理提供了重要的技术指导。随着无人机通信技术的发展,这类研究将对未来无线网络的弹性与适应性产生深远影响。
[无人机通信无人机通信]Three-Dimensional Continuous Movement Control of Drone Cells(持续持续
更新更新)
文章
Three-Dimensional Continuous Movement Control of Drone Cells for Energy-Efficient Communication Coverage
ieee链接
文章目录文章目录引言贡献模型符号集空-空信道空-地信道构建图Jain’s fairness能耗问题建模Optimal Deployment Altitude最佳部署高度强化学习action强化学习reward考虑因素Boundary-
margin mechanism算法
以下中文内容来自谷歌翻译:
引言引言
未来的无线网络既需要高度的敏捷性和弹性,又需要快速的通信服务恢复能力。当遇到意外或临时情况(例如自然灾害,体育赛事)时,用户的极端密度可能会挤满该地区。然后,
将无法及时和/或在经济上不可行地投资于可以在短期内实现收入的电信基础设施。由于无人机具有独特的快速响应机会并减少了对自然灾害的脆弱性,缓解上述情况的潜在解决方案
是诉诸于无人机辅助覆盖,其中部署了无人机来传送无线电信号。为那些拥挤的用户提供服务无人机来传送无线电信号。为那些拥挤的用户提供服务。此外,在研究界中对将无人机用作未来无线网络中的无线电接入平台有很大的兴趣。
贡献贡献
因为涉及多个明显不同的目标,包括能耗,用户QoS要求之和,覆盖范围的公平性以及对网络的约束连接性。因此,设计基于DRL的无人机细胞网络以实现节能通信覆盖面具有很高
的挑战性
模型模型
研究无人机怎么动,能实现最佳通信质量
This paper also discusses the continuous movement control of drone-cells in discrete time-steps, and the terms “time-step” and “decision epoch” are interchangeable. The following
subsections present the detailed system models including the drone-cell mobility model and the channel propagation model
符号集符号集
下载后可阅读完整内容,剩余5页未读,立即下载
2021-11-13 上传
2024-08-30 上传
2021-04-19 上传
2021-08-04 上传
2021-11-28 上传
2021-05-18 上传
2023-08-08 上传
2021-02-04 上传
2021-02-05 上传

weixin_38623366
- 粉丝: 4
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- ***+SQL三层架构体育赛事网站毕设源码
- 深入探索AzerothCore的WoTLK版本开发
- Jupyter中实现机器学习基础算法的教程
- 单变量LSTM时序预测Matlab程序及参数调优指南
- 俄G大神修改版inet下载管理器6.36.7功能详解
- 深入探索Scratch编程世界及其应用
- Aria2下载器1.37.0版本发布,支持aarch64架构
- 打造互动性洗车业务网站-HTML5源码深度解析
- 基于zxing的二维码扫描与生成树形结构示例
- 掌握TensorFlow实现CNN图像识别技术
- 苏黎世理工自主无人机系统开源项目解析
- Linux Elasticsearch 8.3.1 正式发布
- 高效销售采购库管统计软件全新发布
- 响应式网页设计:膳食营养指南HTML源码
- 心心相印婚礼主题响应式网页源码 - 构建专业前端体验
- 期末复习指南:数据结构关键操作详解
