SWD与JTAG的区别及使用场景分析
需积分: 34 11 浏览量
更新于2024-09-10
收藏 491KB DOC 举报
"SWD与JTAG是两种常见的嵌入式系统调试接口,它们用于编程和调试微控制器或系统级芯片。SWD(Serial Wire Debug)和JTAG(Joint Test Action Group)在使用上有所不同,各有优缺点。SWD模式在高速调试时更为可靠,并且在引脚数量有限的情况下更具优势,只需要四个引脚(GND, RST, SWDIO, SWDCLK),而JTAG通常需要五个引脚。对于不同的JLink版本,对SWD的支持程度也不同,例如JLINK V6速度较慢,而V7和V8则提供更快的速度。市场上的一些仿真器如ULINK1不支持SWD,但ULINK2(无论是正版还是盗版)均能良好支持并能达到较高的速度。在选择调试接口时,应考虑设备的引脚资源、速度需求以及兼容性。"
SWD(Serial Wire Debug)是一种由ARM公司推出的低引脚数调试协议,主要用于减少硬件成本和空间占用。与JTAG相比,SWD在高数据传输速率下表现出更高的可靠性,减少了因信号干扰导致的错误。它仅需四根线:接地(GND)、复位(RST)、串行数据输入/输出(SWDIO)和串行时钟(SWDCLK),这使得它在资源有限的嵌入式设计中非常受欢迎。
JTAG则是早期广泛使用的调试和测试标准,最初设计用于电路板的边界扫描测试。JTAG需要五根线:接地(GND)、测试数据输入(TDI)、测试数据输出(TDO)、测试模式选择(TMS)和时钟(TCK)。虽然JTAG提供更全面的硬件测试功能,但在引脚资源紧张或高速调试场景下,SWD成为了更优的选择。
在选择调试工具时,如JLink的不同版本,需要考虑其对SWD模式的支持程度和速度性能。例如,JLink V6支持SWD,但速度较慢;而V7和V8版本显著提高了SWD的调试速度。此外,ULink1不支持SWD,但ULink2无论正版还是非正版,都能提供较快的SWD调试速度。
在实际应用中,开发者需要根据项目的需求,如引脚资源、调试速度、成本和兼容性来决定采用SWD还是JTAG。在某些情况下,如果已经有一个JTAG接口,但需要更高效的数据传输,可以尝试切换到SWD模式,只要所使用的仿真器支持这种切换。SWD因其简洁性和高速性能在现代嵌入式系统中越来越受到青睐。
SWD 与 JTAG 区别及使用情况
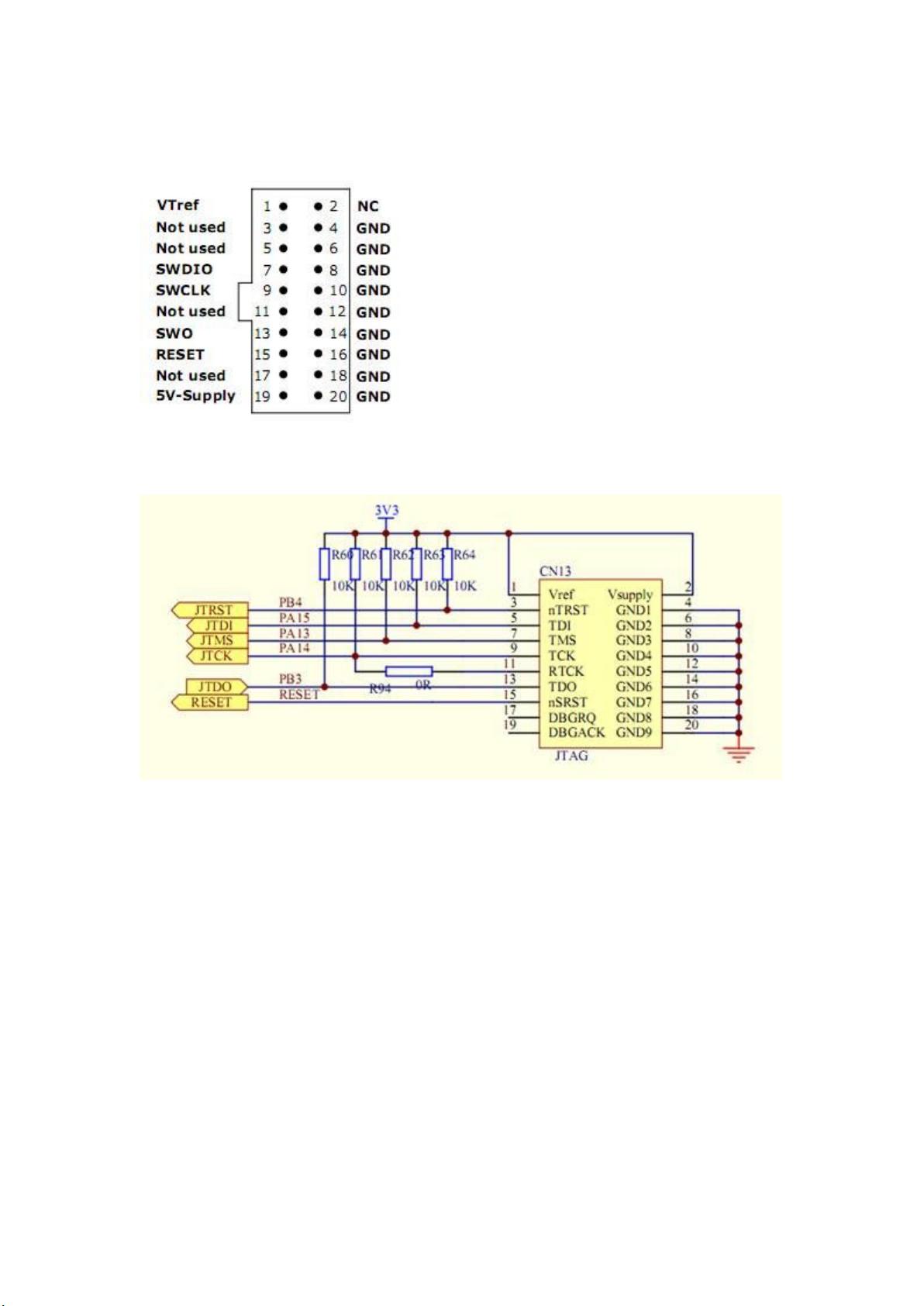
上图是 SEGGER 说明书中给出的 Jlink 引脚图,可以对照着看 SWD 引脚与 JTAG 引脚
的关系。
这是我手边开发板上的 JTAG 连接图,这个肯定是能用的。
下载后可阅读完整内容,剩余7页未读,立即下载
2012-07-28 上传
2022-07-08 上传
2022-07-08 上传
2021-11-25 上传
2024-05-05 上传
2022-06-23 上传
2023-06-06 上传
2021-10-04 上传

cc6450
- 粉丝: 27
- 资源: 160
 我的内容管理
展开
我的内容管理
展开







最新资源
- MyEclipse_Hibernate_Quickstart
- 温度智能调节控制仪器源程序.doc
- Groovy经典入门.pdf
- Manning.ASP.NET.AJAX.in.Action
- SQL语句教程的PDF格式文档
- MyEclipse_EJB_Project_Quickstart
- MyEclipse_Database_Explorer_Quickstart
- PERL编程24学时教程\013.PDF
- PERL编程24学时教程\012.PDF
- MyEclipse_Bugzilla_Quickstart
- PERL编程24学时教程\011.PDF
- PERL编程24学时教程\010.PDF
- PERL编程24学时教程\009.PDF
- PERL编程24学时教程\008.PDF
- PERL编程24学时教程\007.PDF
- MyEclipse_Application_Server_Quickstart
