埃斯顿ER系列工业机器人操作手册_V1.6详解
需积分: 50 168 浏览量
更新于2024-07-09
收藏 9.44MB PDF 举报
"ER系列工业机器人操作手册_RCS2 V1.6.pdf"
这份文档是埃斯顿机器人(E斯顿)的ER系列工业机器人的操作手册,版本RCS2 V1.6,提供了详细的机器人编程和使用指导。手册经过多次修订,增加了多项功能和改进,旨在帮助用户更高效、安全地操作和编程。
自初次发布以来,手册经历了多次更新,例如:
1. 在V1.1版本中,增加了"一点到达"功能,合并了"GetTrackId"与"Tracking"指令,更新了三维视觉的使用介绍,并引入了取整指令。
2. V1.2版本新增了简单码垛功能,修改了"waitcondition"和"waitDI"指令参数描述,优化了变量操作和"RUN"指令描述,同时增加了锁机功能。
3. V1.3版本引入了工程导入导出功能,新增指令,并对区域相关的变量说明进行了修改,还添加了高级功能如一点对正、视觉跟随和九点标定。
4. V1.4版本增加了多工位预约功能,明确了所有运动指令中"DEFAULT"的说明,新增了部分指令。
5. V1.5版本涉及控制器程序更新,增加了通用设置中的吊装选择,修改了回零指令,更新了示教器升级和程序导入导出流程。
6. V1.6版本则对示教器界面进行优化, MovL、MovJ等运动指令增加了工具参数、坐标系参数和工件负载参数,移除了EMovL和EMovC指令,同时新增了MovH、SetRtInfo、SetRtToErr和SetRtWaring指令。
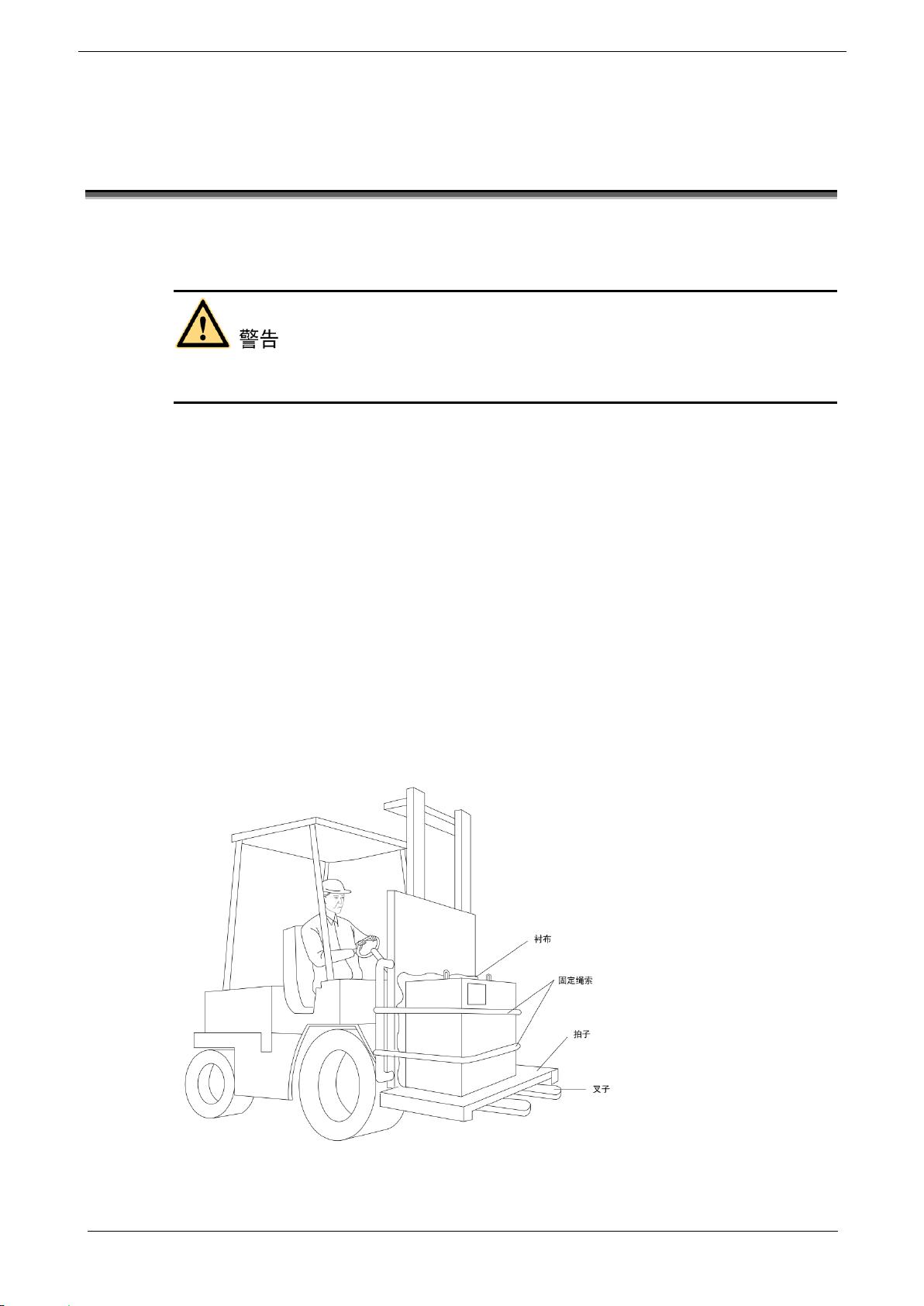
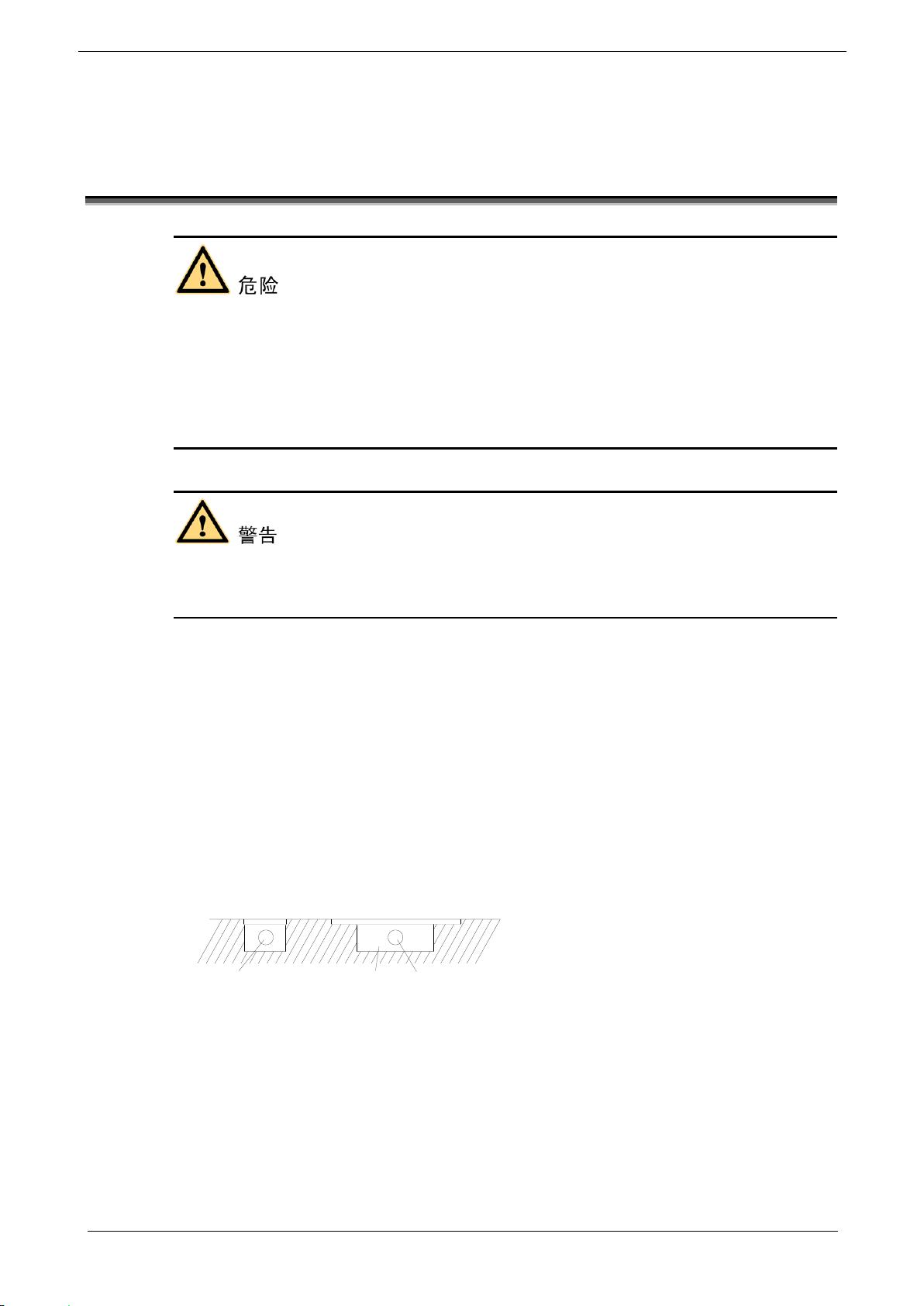
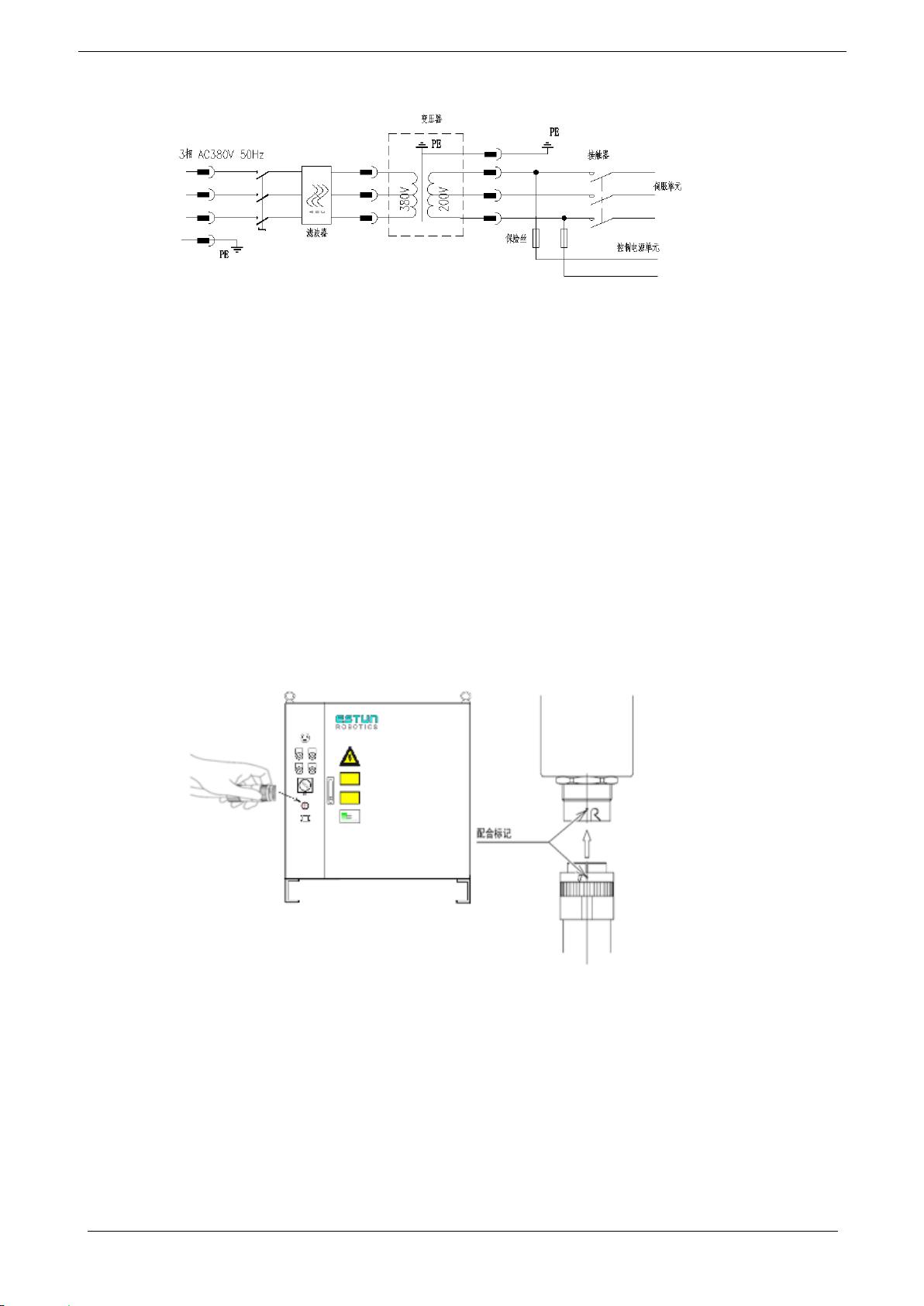
手册内容包括但不限于安全注意事项、产品确认、安装、操作和编程指南等。安全章节强调了保障安全的重要性,对操作人员的安全注意事项、机器人的安全使用、安装及配线、作业区安全、移动和转让以及废弃机器人的处理都给出了详细指导。产品确认部分指导用户检查装箱内容和订货号,确保收到的产品正确无误。安装章节涵盖了搬运方法、安装场所和环境的要求。
此外,手册还可能包含编程语言、指令集的详细介绍,示教器的使用方法,以及故障排查和维护等内容,帮助用户全面掌握ER系列工业机器人的操作和编程技能。这些信息对于任何使用或维护埃斯顿ER系列机器人的技术人员来说都是宝贵的参考资料。

ER 系列工业机器人操作手册
第 2 章产品确认
文档版本 V1.6(适用于 RCS2 V1.18)
版权所有 @埃斯顿自动化 2018
2-1
第 2 章 产品确认
2.1 装箱内容确认
产品到达后,请清点其发货清单,标准的发货清单中包括下列 5 项内容:( 有关选项货物内容的信息将单独
提供)。
机器人
电控柜
示教编程器
供电电缆(机器人与电控柜间的电缆)
全套说明书
图2-1 装箱清单示意图
2.2 订货号确认
确认机器人与电控柜上的订货号是否一致。

剩余183页未读,继续阅读
2021-11-09 上传
2021-06-24 上传
2022-12-16 上传
2022-09-20 上传
2022-09-19 上传
2021-10-11 上传
2021-09-30 上传
2022-07-14 上传
2022-12-16 上传

aixiaofengdaxiong
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
