PLCOPEN运动控制:TC3_MC指令详解
需积分: 30 160 浏览量
更新于2024-07-18
收藏 1.63MB PDF 举报
TC3_MC指令是基于倍福公司(TwinCAT)的高级运动控制功能,它在DriveTechnology10.03.2016版本中被引入,以增强PLCopen运动控制标准的兼容性和灵活性。PLCopen是一种开放的运动控制接口标准,旨在促进不同厂商设备之间的互操作性,使得用户可以更方便地在各种自动化系统中集成和管理运动控制任务。
1. 基于PLCOPEN的运动控制指令:
TC3_MC指令集涵盖了PLCopen规范下的多种功能,如单轴和多轴运动控制,包括但不限于绝对定位、连续运动、加减速运动以及速度、位置和加速度曲线定义。这些指令允许用户精确控制机器人的轨迹和速度,支持非插值和插值运动模式,以满足不同应用场景的需求。
2. TwinCAT NCPTP功能:
TwinCAT NCPTP (Numerical Control Point-to-Point Technology) 提供了丰富的功能,如电子齿轮同步,确保多轴运动时的精确同步;数字凸轮开关用于设定复杂的运动路径;凸轮轴和运动叠加(合成)则支持多轴间的协同工作,如飞剪应用中的协调切割动作。
- 普通定位运动:执行从一个位置到另一个位置的直线或圆弧运动。
- 电子齿轮同步:通过软件实现的齿轮同步技术,提高多轴运动的精度和可靠性。
- 数字凸轮开关:通过预定义的程序逻辑控制运动的启停,实现复杂路径的控制。
- 凸轮轴:用于定义运动路径的轮廓,支持不同的运动模式。
- 运动叠加:多个运动指令可以同时作用于一个轴,实现复合运动。
3. 功能块概览:
TC3_MC指令集包含了一系列PLCopen功能块,如MC_MoveAbsolute(绝对移动)、MC_MoveRelative(相对移动)、MC_MoveAdditive(累加运动)、MC_MoveSuperimposed(合成运动)等,它们分别对应不同的运动控制需求。此外,还有控制停止、速度/加速度曲线设置、位置和速度读写、参数读写、实际位置查询、以及运动状态监控等功能。
4. 继续关注其他功能:
- DiscreteMotion(离散运动)适用于开关式的动作控制。
- ContinuousMotion(连续运动)支持不间断的运动控制。
- Standstill(静止)命令用于使机器停止运动。
- MC_Stop(停止控制)和MC_MoveVelocity(速度控制)进一步细化了停止和速度调整的操作。
- 安全功能,如Power(断电保护)、Reset(复位)、以及读取和写入轴错误状态等。
总结来说,TC3_MC指令是倍福TwinCAT平台中的一个重要组成部分,它提供了一个强大的运动控制工具箱,让用户能够利用PLCopen标准创建和管理复杂而精确的工业机器人和自动化设备的运动控制程序,极大地提高了系统的灵活性和生产效率。通过理解和掌握这些指令,工程师可以更好地设计和优化生产线的控制流程。
Drive Technology 10.03.2016 7
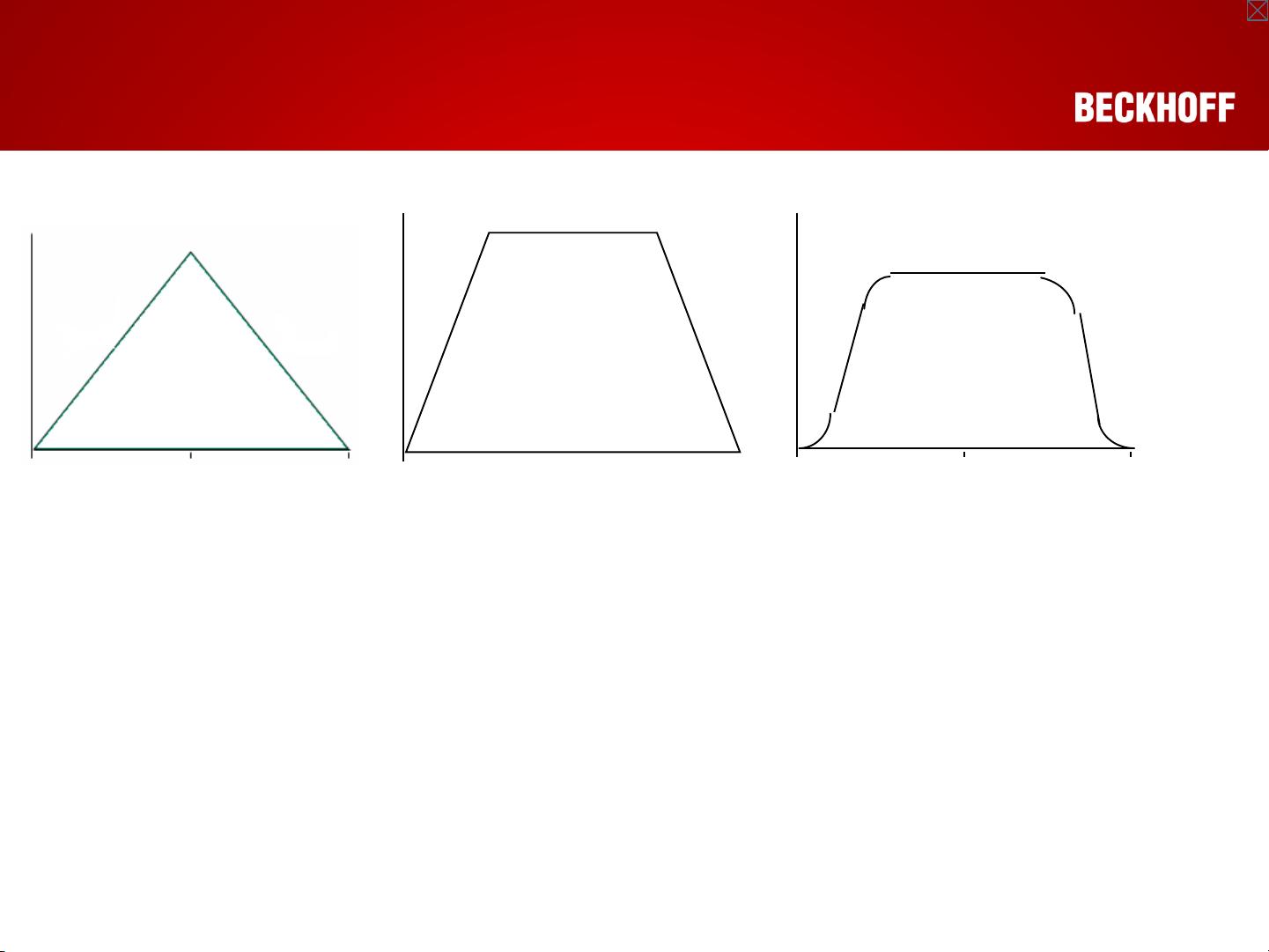
time (s)
1
2
0
点到点定位的速度曲线类型
• 梯形曲线,三角波曲线
该曲线类型能够以最快的时间达到
• S形曲线
该曲线类型能够减少执行元件对机
工艺所要求的速度,并走完定位.
械的冲击,即jerk值.
S曲线的柔滑度是可以修改的,用来
调节点到点的运行时间和抗冲击性
之间的平衡.
TwinCAT NC PTP- --点到点运动
剩余34页未读,继续阅读
2022-04-13 上传
2018-12-20 上传
2024-11-27 上传
2009-12-10 上传
2013-04-03 上传
2011-10-11 上传
2011-12-08 上传
2022-05-28 上传

dodo_code
- 粉丝: 818
- 资源: 32
 我的内容管理
展开
我的内容管理
展开







最新资源
- MySQL中文参考手册
- 第 8 章:管理模式对象.pdf
- 第 7 章:管理用户和安全性.pdf
- 第 5 章:管理 oracle 例程.pdf
- 第 4 章:配置网络环境.pdf
- 第 3 章:oracle enterprise manager 入门.pdf
- 第 2 章: 安装 oracle 软件并构建数据库.pdf
- oracle dba 两日速成课程.pdf
- 电源滤波器的相关标准及试验和测量程序
- c#新手教程 学习c#必看
- 电源变压器的基本原理及检验要求
- jdk环境变量配置问题
- OSGI详解——关于OSGI的详解
- android.graphics.Color实践 Android 开发
- Android 的应用程序结构分析:HelloActivity
- Android SDK1.5新视角 (介绍AndroidSDK1.5新特性)
