Apollo自动驾驶架构详解
需积分: 46 107 浏览量
更新于2024-08-05
2
收藏 797KB PDF 举报
“进阶课程㊲丨Apollo自动驾驶架构介绍”
本文将深入探讨Apollo自动驾驶架构,这是一个由百度开发的开源自动驾驶平台。Apollo系统依赖于复杂的硬件和软件组件,以实现安全高效的自动化驾驶。其架构分为四个主要层次:车辆平台、传感器层、核心软件层和云服务层。
首先,车辆平台是整个架构的基础,负责执行由Apollo生成的控制指令。车辆必须具备线控能力,即能够接收并执行如换挡、加速、减速和转向等命令。在Apollo 3.0之前,这些车辆被称为参考平台,而在之后,百度推出了开放车辆认证平台,明确了车辆需具备的线控功能和性能指标,使得任何符合标准的车辆都可以经过改装来运行Apollo系统。
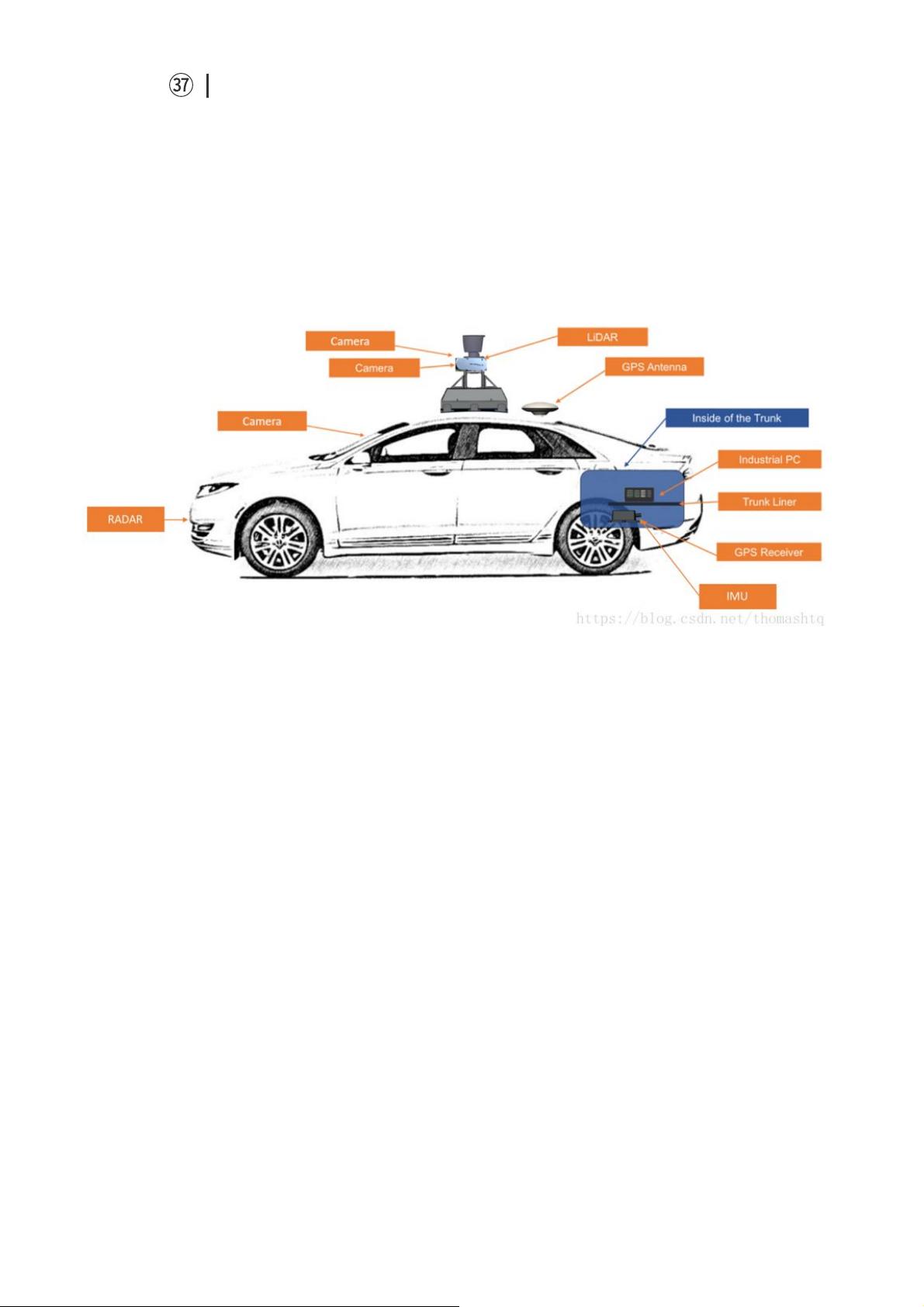
传感器层是感知环境的关键部分,包括激光雷达、摄像头、GPS/IMU、毫米波雷达和超声波雷达。其中,GPS/IMU用于高精度定位,摄像头主要用于红绿灯识别,而主激光雷达则用于环境感知,例如百度内部使用的Velodyne 64线雷达和禾赛的Pandora。此外,Apollo还支持不同线数的其他雷达型号,如16线的速腾聚创和镭神科技产品。毫米波雷达用于远距离障碍物检测,超声波雷达则适用于近距障碍物检测。人机交互界面(HMI)设备,如平板电脑,用于用户与车辆的交互,而Blackbox则记录关键数据,类似于飞机的黑匣子。
核心软件层是Apollo的神经系统,包含实时操作系统(RTOS)、感知模块、决策模块和控制模块。Apollo使用定制化的RTOS以确保实时性,并在此基础上构建了软件堆栈。中间层可能包括各种算法模块,如计算机视觉、深度学习和传感器融合,这些模块共同处理来自传感器的数据,进行目标检测、路径规划和车辆控制。
最后,云服务层提供了远程数据处理和分析能力,包括地图更新、高精度定位服务、车辆状态监控以及数据分析。通过云服务,Apollo能够进行大规模的数据处理和学习,不断提升自动驾驶系统的智能水平和安全性。
总结来说,Apollo自动驾驶架构是一个综合性的系统,涵盖了从硬件到软件的所有关键元素,旨在实现安全、智能的自动化驾驶。通过不断的版本迭代和开放平台策略,百度持续推动着自动驾驶技术的发展和应用。
进阶课程
㊲
丨Apollo自动驾驶架构介绍
自动驾驶硬件架构:一般采用激光雷达作为主要感知传感器,同时结合摄像头、GPS/IMU、毫米波雷
达、超声波雷达等,以NVIDIA Drive PX2 或 Xavier作为主要计算平台,在工业PC机上运行各种算法
模块,通过线控技术控制车辆行驶。
百度开源自动驾驶系统Apollo的架构图如下所示:
以下,E N J O Y
Apollo自动驾驶平台的架构如下图所示。该架构是Apollo 在2017年7月5号发布的,主要包括四个部
分:最底层的车辆平台,往上一层的传感器层,第三层的核心软件 层以及最上层的云服务层。
下载后可阅读完整内容,剩余4页未读,立即下载
2235 浏览量
131 浏览量
113 浏览量
117 浏览量
118 浏览量
137 浏览量
198 浏览量

疯狂的机器人
- 粉丝: 9319
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Win10和VS2017使用C++跨平台开发的技巧
- RTGraph:实时数据绘图与存储的Python应用
- Ruby-Scrolls简易日志记录工具解析
- 基于汇编语言的算术练习软件开发
- ABCnotation在Haskell中的实现解析及限制
- IncreSync:强大增量文件同步备份解决方案
- 掌握Microsoft Robotics Developer Studio中文教程
- JeeCMS-v2.0:Java版开源内容管理系统发布
- 提升效率:vim-dispatch实现异步构建与测试
- ECShop多支付插件轻松整合支付宝、微信、财付通
- GOOGLE MAPS API在WEBGIS课程作业中的应用
- C语言盒子接球游戏完整源码及运行指导
- DSA善领2011黄金版:一键配置根目录便捷使用
- 掌握IpHelper:必备头文件与lib文件教程
- QLogger:Qt多线程记录器应用详解
- 实现类似圆角ListView的textView点击效果
