实时双目视觉障碍深度感知研究
需积分: 10 54 浏览量
更新于2024-07-19
收藏 1.92MB PDF 举报
本文档《实时障碍物深度感知使用立体视觉》是一篇由Tianyu Gu撰写的硕士论文,提交于佛罗里达大学研究生院,作为获得硕士学位的部分要求。该研究专注于实时利用双目视觉技术进行深度感知,共计66页,包含相关代码和深入的理论探讨。
在论文的开篇,作者首先介绍了立体视觉的基本概念,即Stereo Vision,它是一种通过同时捕捉来自两个或多个不同角度的图像来创建三维场景的技术。这种技术对于机器人导航、自动驾驶、无人机操作等应用至关重要,因为它能提供精确的距离和空间信息,有助于实时避开障碍物。
论文的核心部分深入探讨了立体对应(Stereo Correspondence),这是立体视觉的关键步骤,即找出两幅图像中对应物体的位置,通常是通过匹配像素特征或深度信息来实现。作者可能讨论了各种方法,如像素级别的匹配、特征匹配、结构从运动(Structure from Motion, SfM)或光流估计,这些技术旨在解决视差问题,为计算物体距离提供准确的数据。
论文还可能涵盖了立体匹配算法的实现,如基于像素的方法(如SIFT、SURF、ORB等)或基于深度学习的深度估计网络(如深层卷积神经网络,CNN)。此外,作者可能分享了如何处理实时性挑战,比如降低计算复杂性、优化算法性能以及如何适应不同的光照和环境条件。
在实验部分,论文可能会展示实际的硬件平台、数据采集、以及使用所选算法处理实时障碍物深度感知的效果。同时,作者可能会分析结果的精度、鲁棒性和与其他方法的比较,以此证明其方法的有效性和实用性。
最后,论文的结论部分会总结研究成果,强调立体视觉在实时障碍物感知中的应用前景,并讨论未来可能的研究方向和改进点。作者还表达了对导师Carl Crane、John Schueller、Ryan Chilton以及实验室同事Antonio Arroyo、Eric M. Schwartz和Josh Weaver的感激之情,他们对研究的支持和指导对论文的完成起到了关键作用。
《实时障碍物深度感知使用立体视觉》是一篇结合理论与实践的研究论文,提供了深度感知技术在实时系统中的应用策略和技术细节,对那些对计算机视觉和机器人技术感兴趣的读者具有很高的参考价值。

11
CHAPTER 1
INTRODUCTION
Stereo Vision at a Glimpse
Stereo vision, just like human eyes, infers distance from two images taken from different
views. It is based upon the fact that the same object would appear at slightly different locations
in the left and right eye of a human, which is recognized as a disparity. People will have trouble
in walking or grasping things if they close one of their eyes. Similarly, a robot can hardly extract
depth information from the environment only with a single camera. Therefore, the research of
stereo vision systems is of key importance.
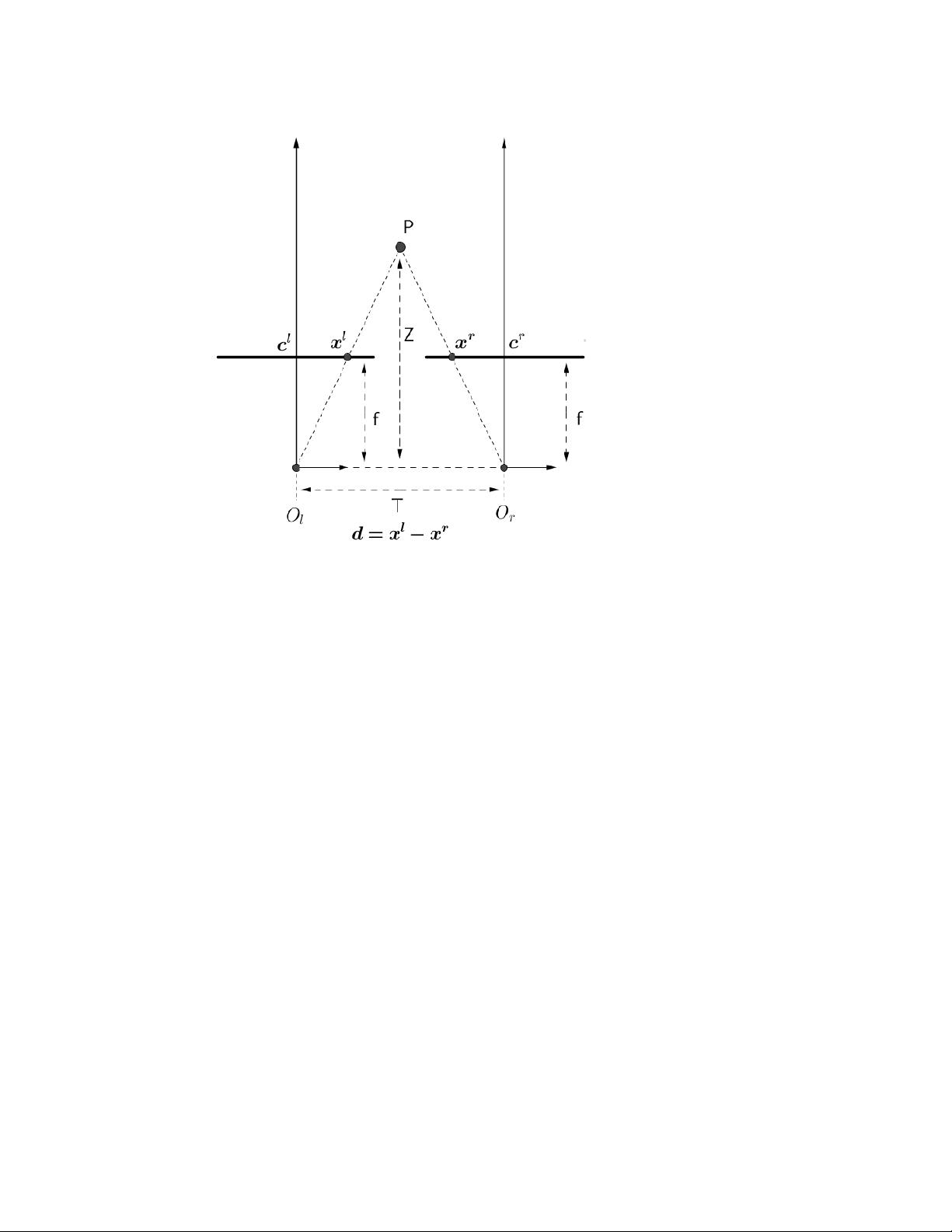
Binocular stereo vision uses a pair of frontal parallel cameras to infer distance by
calculating the disparity of pixel in different image planes, as shown in Figure 1-1. A scene
object P is viewed by both left and right camera simultaneously, and the position of P on each
image is denoted as
and
respectively. Let’s assume that the focal lengths f of both cameras
are the same, and the images are undistorted and row-aligned. The distance of object point can
then be easily calculated from the similar triangles
and
, which yields
=
(1-1)
solving for gives
=
(1-2)
We can see that depth is inversely proportional to the disparity. This is true when you
look at same object using different eyes: things that are closer will shift more than those farther
away.
Stereo Correspondence
One of the major problems of stereo vision is stereo correspondence. An image is
comprised of hundreds of thousands of pixels. Each pixel is a result of a scene point being


剩余65页未读,继续阅读
2010-10-27 上传
2009-08-07 上传
2017-12-05 上传
2023-10-31 上传
2020-07-29 上传
2010-09-26 上传
2021-10-01 上传
2015-04-15 上传
2021-02-11 上传

shelleyd03
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
