WorldView-2多角度多时相遥感图像超分辨率重建操作方法
本文主要探讨了多角度多时向遥感图像的超分辨率重建技术,针对WORLD-VIEW2卫星提出了一种创新的解决方案。研究者 Jianglin Ma、Jonathan Cheung-Wai Chan 和 Frank Canters在《IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing》上发表了这篇论文,旨在解决遥感图像中的高分辨率重建问题。
首先,他们关注的是图像的精确配准(registration)阶段。为了处理局部几何变形和光谱差异带来的复杂性,作者提出了一个混合基于patch的注册方法。这种方法考虑到了诸如云层和云影等自然障碍物对图像匹配的影响,并在注册过程中对其进行有效的检测和处理,确保了后续处理的准确性。
在图像重建(reconstruction)阶段,研究人员采用了L1范数数据拟合(L1 norm data fidelity)和Total Variation(TV)正则化相结合的模型。L1范数强调稀疏性,有助于去除噪声,而TV正则化则保持图像的边缘细节,使重构后的图像既保持高分辨率的特征,又保持整体的平滑性。他们通过最陡下降法(steepest descent method)有效地求解了这个重建目标函数,显示出该方法在处理大规模遥感数据上的高效性能。
值得注意的是,该论文不仅提供了具体的技术细节,还展示了算法的实用性,因为它是设计为在实际操作环境中应用的,这意味着它能够处理实时或批量的多时相、多视角的WorldView-2遥感图像。这在遥感数据分析和地球观测领域具有重要意义,因为它能提升图像的解析能力,从而帮助科学家和决策者获取更精确的地理信息。
总结来说,这篇文章贡献了一个完整的框架,包括图像配准的策略和超分辨率重建的优化模型,为提高多角度多时相遥感图像的质量提供了一种实用且高效的方法。这对于遥感图像处理领域的进一步发展和技术进步具有积极推动作用。
IEEE Proof
Web Version
6 IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING
where and are the -spatial, -spatial and
temporal derivative of
respectively. By substituting (11)
in (1 0) we get a quad ratic error function, which i s now linear
for its unknown
. Therefore, we obtain an analytic expression
for
:
(12)
where
and
.From(12)itseemsasifwe
can obtain the registration parameters
directly without itera-
tion. However, the estimator for
requires an estimator for ,
which also requires an estimator for
. Therefore, the expec-
tation-maximization ( EM) algorithm is used for s olvin g
,and
the whole algorithm procedure is defined as follows:
1) Initialization: assign the fixed constants
and , and pro-
vide initial estimate for
.
2) E-Step: compute
. This step also invo lves the pro cess of
classifying p ixels either into the
region or into the
region. Pixels belon gin g to have a close to zero weight.
3) M-Step: calculate
. This can be don e with the classical
differential method proposed in [7], which relies on a
Newton-Raphson style iterative scheme to approximate
the solution, and a Gaussian pyramid scheme to increase
the convergence speed.
4) The last two steps are repeated until the difference betw een
successive estimates of
falls below a small threshold
value.
3) Patch-Based Registration and Superresolution: In our ex -
periments the image patch size was set at 96
96 as a compro-
mise between accurate model adaptation and estimation. Once
image patches are accurately registered, it is important to elimi-
nate the blocking effect typical for patch-based approaches and
make sure that adjacent image patches match. There are two
ways to eliminate the blocking effect [23]: o ne is to apply an av-
eraging kernel with an appropriate size to smoo th the resulting
image, which will inevitably decrease the image qualit y; the
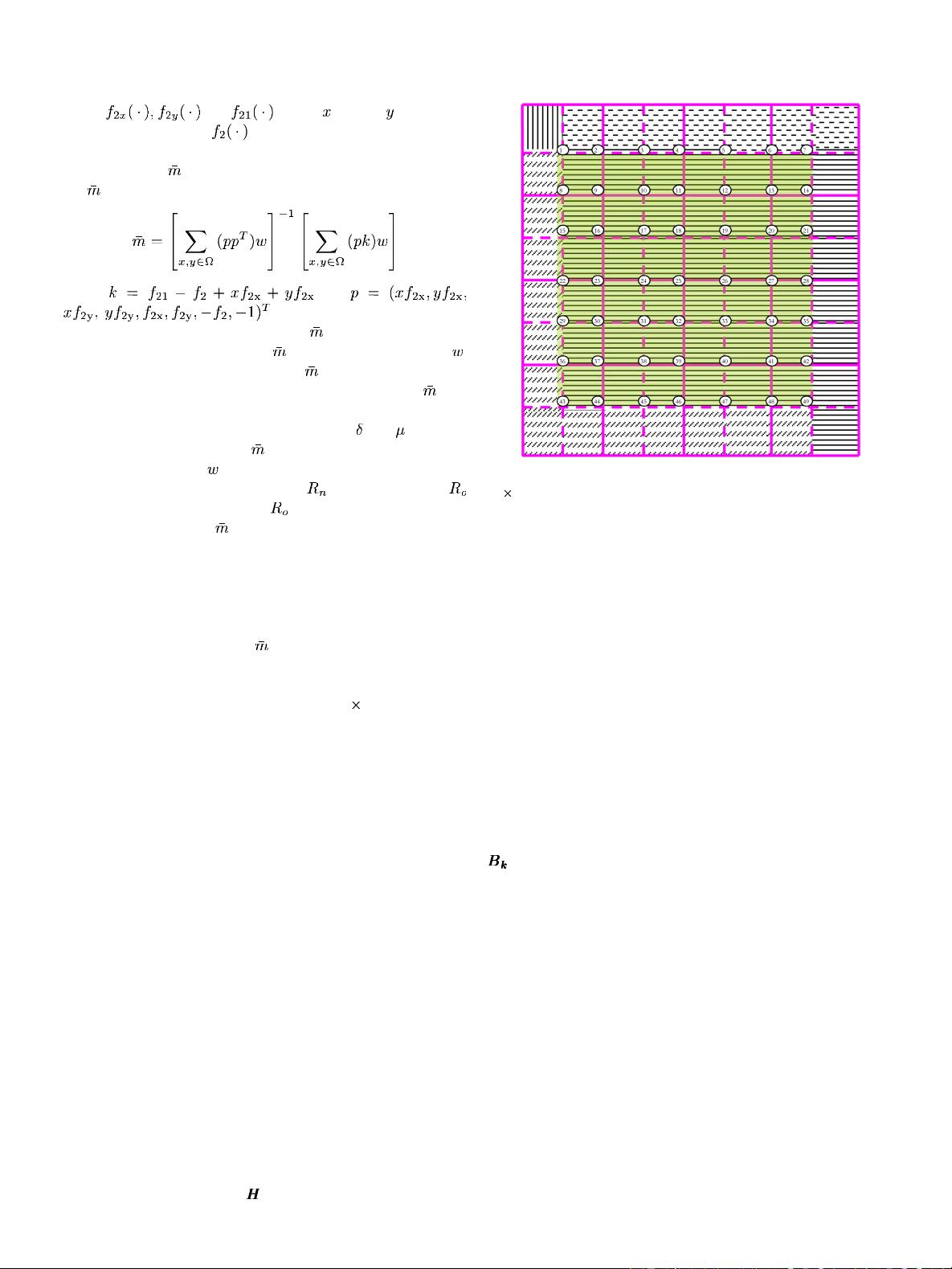
other is to div ide the image into overlapping blocks as show n
in Fig. 4, which is the method adopted in this pap er. In Fig. 4
the small tile is of size 48 by 48, and each image patch is com -
posed of four tiles. Using the moving window app ro ach, in t he
example there are 49 image patches all together instead of 16,
with the patch center indexed as i llustrated in Fig . 4. For any
image tile (except those near the edge) spatial consistency is
obtained by averaging the differences (geometric displacement,
photometric disparity and reconstructed discrepancy) for the
four floating patches the tile belongs to. By adopting this sliding
half-window m e th od, we can make sure that the transfo rmation
between images is locally affine but globally smooth.
The patch-based scheme has the following m erits for SR:
1) Although the global transform is not invertible, for each
patch the transform is invertible, therefore state-of-the-art
SR algorithms can be implemented in this scheme.
2) Remote sensing images often have a large size; therefore
the construction of the
matrix in (2) may p ose compu-
tational problems. Constructing the matrix at patch level
Fig. 4. An illustration of overlappin g image patches. The small tile is of size
48
48, and the image patch is composed of 4 tiles. The solid line represents the
positions of non-overlappin g image patches while the dashed lines denote the
sliding positions. The centers of overlapping image patches are indexed from 1
and 49. Only the image tiles shown in green can be processed using the approach
proposed.
is efficient and allows application of t he method on full-
size imagery. The patch-based scheme also enables par-
allel processing of SR.
3) Although patch-based image registration has been criti-
cized because image details may be overly smoothed, and a
polyaffine scheme has been proposed to solve this problem
[24], w e found that simple fusion of SR patches by aver-
aging d oes not deteriorate the SR result. In the spatially-
varying PSF image deconvoluti on literature, this simple fu-
sion method is comm on practice [20].
C. PSF E stimation and Construction of the H Matrix
From (2) we can see that the PSF that defines th e blur matrix
is applied on the und erlying HR image instead of on the LR
image. There are two ways to derive it, as follows:
1) One is referred to as the blind-SR metho d, which assu mes
that the HR image can be m odeled by means of an inho-
mogeneous image mod el such as the Potts-Markov model
[25]. However, the complexity of a remote sensing scene
often does not allow the use of this approach. Moreover,
the simultaneous estimation of t he PSF and the HR image
usually requires iteration and, therefore is computationally
heavy.
2) The other possibility is to first estimate the PSF of the L R
image and th en linking it to the PSF of the underlying HR
image. Compared to estimating the PSF blindly, on-orbit
determination of the PSF of LR images, where the PSF
is calculated by w ay of specific objects in the observ ed
images, is more reliable. The local affine assumption also
makes it easier to define the relationship b etween the PSF
of the LR i mage and that of the HR image. Therefore, in
this study this strategy is adopted .
剩余29页未读,继续阅读
210 浏览量
点击了解资源详情
2022-12-15 上传
2021-04-27 上传
201 浏览量
2021-09-25 上传
250 浏览量

ifeelfree
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
