SOPAS工程工具:SICK Visionary-T激光传感器参数配置指南
需积分: 18 184 浏览量
更新于2024-07-15
1
收藏 5.9MB PDF 举报
"该文档是关于SICK面激光传感器Visionary-T的官方操作软件SOPAS Engineering Tool的详细参数配置指南。它涵盖了设备页面、可视化、设置菜单、配置、状态/诊断等多个方面,旨在帮助用户理解和操作这款高级传感器。"
在深入探讨SOPAS Engineering Tool的参数配置之前,我们先来了解一下Visionary-T。Visionary-T是SICK公司推出的一款高精度表面激光传感器,它主要用于三维空间数据的捕捉和分析,广泛应用于工业自动化、物流、机器人等领域。这款传感器具备先进的飞行时间(TOF)技术,能提供高分辨率和高精度的测量结果。
SOPAS Engineering Tool是与Visionary-T配套使用的软件,它允许用户进行深度配置和管理,包括以下几个主要部分:
1. **Visionary-T Device Page**:这是设备的基本设置界面,用户可以在此查看传感器的状态,进行登录、管理工作任务、保存配置、记录功能以及回放已录制的文件。
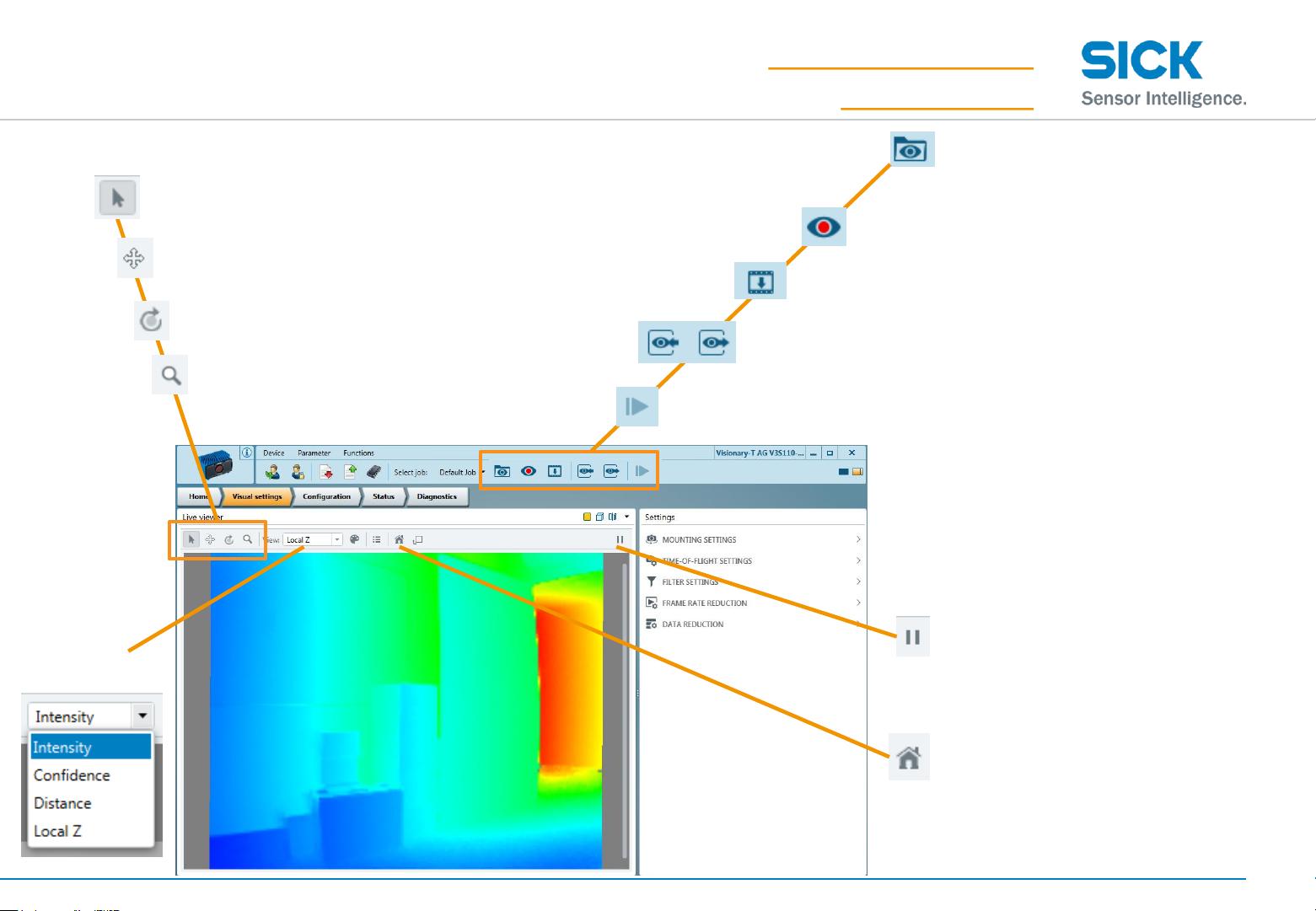
2. **Visualization**:这部分提供了2D和3D的视图,用户可以通过各种视图来观察和分析数据。包括特性、测量栏、2D和3D查看器等。可视化设置让用户自定义显示参数,而导航功能则帮助用户在复杂的数据环境中轻松移动。
3. **Settings Menu**:这是参数配置的核心部分,包括概述、安装设置(无数据减少和有数据减少)、时间-of-flight设置、过滤器设置(如基于ROI、笛卡尔坐标、飞行像素、动态模式、距离、信心、强度、平滑和孤立像素的过滤器)以及帧率减少和数据减少选项。这些设置直接影响到传感器的性能和数据质量。
4. **Configuration**:用户可以在这里配置数字I/O设置、API数据通道以及UDP/TCP网络设置,确保传感器与其他系统或设备的通信顺畅。
5. **Status/Diagnostics**:提供传感器的运行状态和诊断信息,帮助用户监控设备健康并排查问题。
6. **Google Chrome Interface**和**ROS Repository**:可能指的是使用Chrome浏览器访问设备接口以及与Robot Operating System (ROS)的集成,这对于自动化和机器人应用尤其重要。
通过以上内容,我们可以看到SOPAS Engineering Tool的强大功能,它不仅允许用户根据具体应用场景调整传感器参数,还提供了丰富的数据可视化和分析工具。正确理解和使用这款软件,将有助于最大化地发挥Visionary-T激光传感器的潜力,提升应用的效率和准确性。
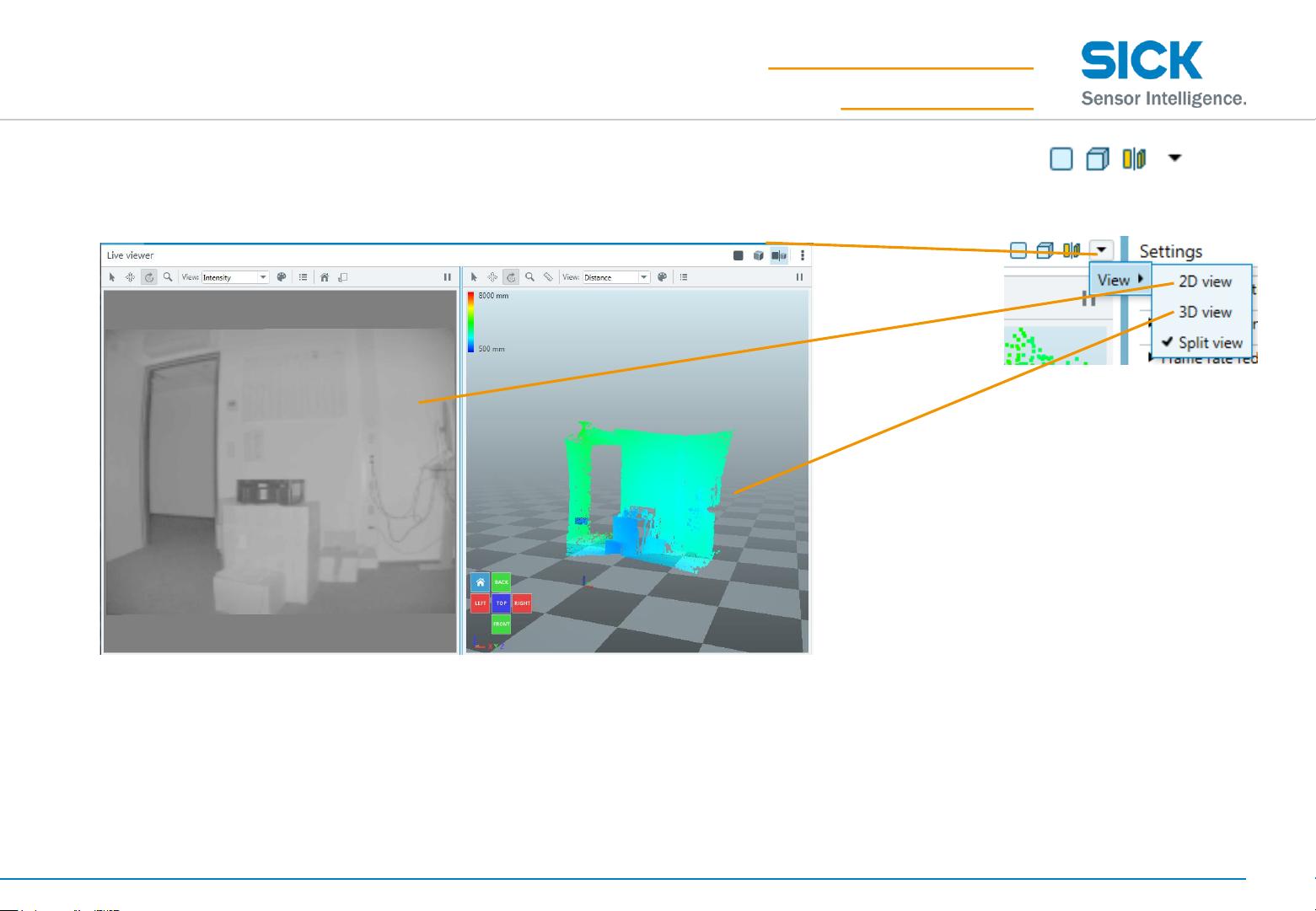
Use the SOPAS ET feature on the upper right corner to switch between the 2D -, 3D-viewer or both
at the same time. On the right side you can find the settings
This scene shows a room with difference objects, like a chair, a table, a coat stand and some boxes. On the left you can
see the 2D, on right the 3D point cloud view of this scene. Both views contain the same information
The refresh rate of the visualization depends on the computer performance
VISUALIZATION
FEATURES
13
CLICK here to go back
to the CONTENT
3D Compact Systems - SICK AG
12.11.2019

剩余74页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-08-06 上传
2022-10-14 上传
2021-03-28 上传
2021-05-14 上传
2021-05-02 上传
2021-03-07 上传

jagict
- 粉丝: 0
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- IOS应用源码Demo-设计精美的机遇tableView的个人简介模板-毕设学习.zip
- test262-parser:解析test262格式的测试并提供API
- 基于STM32的机器人设计资料 包含程序原理图文件
- 基于微信小程序的数字名片实现源码.zip
- Advanced_Descriptors-2.1.0-cp35-cp35m-manylinux1_i686.whl.zip
- iSlider手机端图片滑动切换
- 手机wap源码模板 (43).zip
- Ethernet bridge tables-开源
- IOS应用源码Demo-两个OPENAL例子,网上找的,共享一供学习OpenAlTest-毕设学习.zip
- slim-bookshelf:探索性Slim Framework 3应用程序
- 含仿真录像,基于DWT-DCT-SVD的多通道彩色图像水印系统MATLAB仿真,并测试各类attack对水印鲁棒性影响
- DDK拧紧枪参数设置软件(英文版).zip
- Cake.StyleCop:CakeBuild构建系统的Stylecop实现
- 基于jsp的鱼类饵料管理系统源码.zip
- add-variety-cpp-6872Vishal:add-variety-cpp-6872Vishal由GitHub Classroom创建
- libBand-开源
