点对特征模式识别系统:设计、实现与加速技术
需积分: 8 125 浏览量
更新于2024-08-04
收藏 556KB PDF 举报
"该资源是一本关于基于点对特征的模式识别系统设计与实现的代码大全,涵盖了从特征提取到分类的过程。系统利用定向点对特征创建全局模型描述,通过快速投票方案进行匹配,适用于点云数据的模型与场景识别。书中详细介绍了硬件和软件环境需求,以及使用的数据集和特征提取方法。"
基于点对特征的模式识别系统是一种高效且灵活的计算机视觉技术,主要用于识别和匹配3D模型。系统的核心在于定向点对特征,它描述了两个点之间的相对位置和方向,这有助于构建全局模型,即使在数据稀疏的情况下也能保持较高的识别效率和准确性。
系统设计主要包括以下几个方面:
1. **特征描述**:点对特征描述了模型上两个点的相对位置和它们的法线方向,形成一个全局模型描述。这个描述将相似特征分组,提供模型表面所有点对特征的全局分布。这种方法相比于依赖密集局部信息的局部方法,可以使用更少的数据,同时保持良好的识别性能。
2. **匹配方法**:采用了快速投票方案,通过在减小的搜索空间中优化模型姿势,该空间依据模型点和法线周围的旋转参数化。这种方法类似于广义Hough变换,能够在减少计算复杂性的同时加快识别速度。
3. **硬件与软件环境**:实验所需硬件是个人PC,配置为8GB内存和i5-8250u处理器;软件环境为Visual C++。这些基本配置表明,该系统可以在常见的个人电脑上运行。
4. **数据集**:数据集包含模型和场景的点云信息,每个点有6个维度的向量表示,包括位置和姿态信息。数据集中的例子如"parasaurolophus_6700.ply"和"rs22_proc2.ply"。
5. **特征提取**:特征提取过程中,首先从CAD模型或深度设备获取模型数据,然后通过下采样(如体素网格方法)减少计算量。接着计算PPF(点对特征)描述,将所有可能的点对转化为四维向量存储,以备后续匹配使用。
6. **分类过程**:分类过程始于局部匹配,选取场景中的点与模型特征进行对比,通过哈希表加速查找,找到匹配的点对。这一过程涉及构建特征点的哈希表,以四元组形式存储特征,便于快速定位。
整体而言,这个基于点对特征的模式识别系统设计旨在解决3D对象识别的挑战,通过高效的特征描述和匹配策略,实现了对稀疏数据的高效处理,适用于多种实际应用场景。书中的代码大全提供了详细的实现细节,对理解该领域的技术有极大帮助。
题目 基于点对特征的模式识别系统的设计与实现
1.1 题目的主要研究内容
(1)工作的主要描述
我们提出了一种使用定向点对特征创建全局模型描述并使用快速投票方案
进行匹配的方法。点对特征描述了两个定向点的相对位置和方向。全局模型描述
由所有模型点对特征组成,表示从特征空间到模型的映射,其中模型上的相似特
征分组在一起。这种表示提供了模型曲面上所有点对特征的全局分布。与需要密
集局部信息的局部方法相比,我们的方法允许模型和场景数据仅由一组稀疏的定
向点表示,这些定向点可以很容易地从输入数据中计算出来。使用稀疏数据还可
以显著提高识别速度,而不会显著降低识别率。与广义 Hough 变换类似,快速投
票方案用于在局部缩减的搜索空间中优化模型姿势,该搜索空间根据模型上的点
和曲面法线周围的旋转进行参数化。我们在许多合成序列和真实序列上测试我们
的方法,并将其与最先进的方法进行比较。
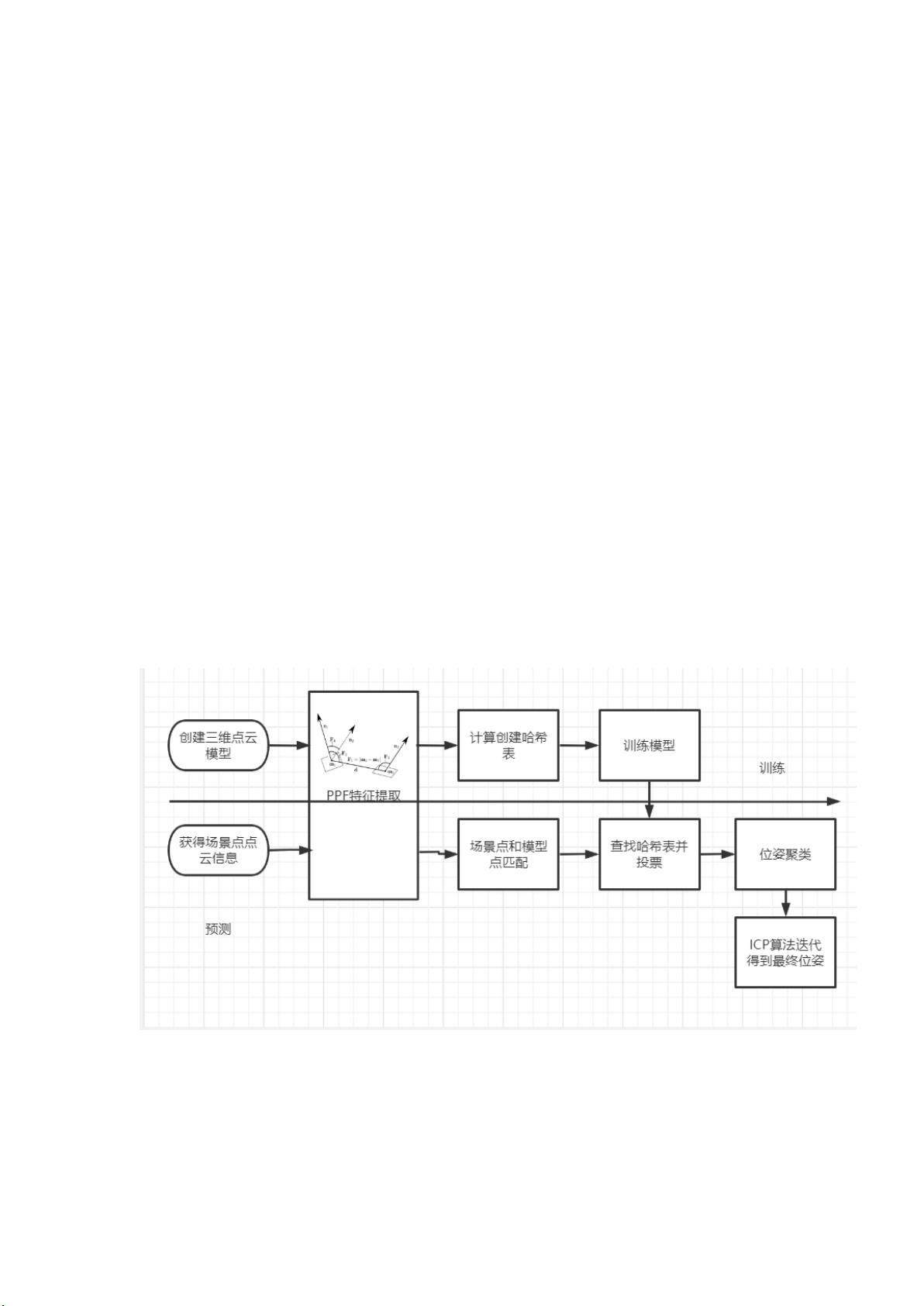
(2)系统流程图
1.2 题目研究的工作基础或实验条件
(1)硬件环境
个人 PC 端(8G 内存,i5-8250u)
(2)软件环境
下载后可阅读完整内容,剩余6页未读,立即下载
2022-10-19 上传
2022-10-19 上传
2022-10-19 上传
2022-06-03 上传
2022-10-19 上传
2022-10-19 上传
2022-10-19 上传
2022-10-19 上传
2022-10-19 上传

李逍遥敲代码
- 粉丝: 2997
- 资源: 277
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
